

SI VIS PACEM, PARA BELLUM - “SVPPBELLUM.BLOGSPOT.COM"
Il Naval Tactical Data System ( NTDS ) era un sistema computerizzato di elaborazione delle informazioni sviluppato dalla Marina degli Stati Uniti negli anni '50 e utilizzato per la prima volta all'inizio degli anni '60 per l'uso sulle navi da combattimento. Il sistema riceveva ed elaborava dati da più sensori su diverse navi e li decodificava per produrre una mappa unificata dello spazio della battaglia. Queste informazioni venivano quindi ritrasmesse alle navi della Squadra navale e agli operatori delle armi.
Motivo dello sviluppo
Le navi da guerra hanno compartimenti noti come Combat Information Centers, o CIC, che raccolgono, smistano e quindi comunicano tutte le informazioni sul campo di battaglia note a quella nave. Le informazioni sugli obiettivi verrebbero inoltrate al CIC dagli operatori dei sistemi radar e sonar, dove i membri dell'equipaggio usano queste informazioni per aggiornare una mappa condivisa. I comandanti usano la mappa per dirigere le armi verso bersagli ostili particolari. Il sistema prendeva spunto dal sistema britannico Bunker della Battaglia d'Inghilterra, ma su scala ridotta.
C'erano due grossi problemi con questo sistema: uno era che ogni nave aveva la propria visione dello spazio della battaglia, indipendente dal resto delle navi della task force. Ciò comportava problemi di allocazione della forza: la nave con l'arma giusta per un particolare bersaglio poteva non vedere quel bersaglio sui propri sensori, oppure due navi potevano tentare di attaccare lo stesso bersaglio ignorandone un altro. Questa situazione poteva essere risolta aggiungendo segnali radio o di bandiera tra le navi come un altro input alla mappa, ma il carico di lavoro per spostare così tanti bit di dati era enorme. Ciò portava al secondo problema principale: l'elevato fabbisogno intrinseco di addetti e la mancanza di spazio a bordo.
Durante la seconda guerra mondiale e l'immediato dopoguerra, le principali marine iniziarono a studiare a fondo questi problemi, poiché le preoccupazioni per gli attacchi coordinati di aerei ad alta velocità a lungo raggio divennero una seria minaccia. Per dare alla task force un tempo di reazione sufficiente per affrontare queste minacce, i "picchetti" venivano posizionati ad una certa distanza dalla forza per consentire ai loro radar di rilevare gli obiettivi ostili mentre erano ancora in avvicinamento. Le informazioni da queste navi dovevano quindi essere trasmesse, normalmente a voce, alle altre unità della forza navale. Furono tentati alcuni esperimenti con videocamere puntate sui display radar, ma erano soggette a perdita di trasmissione quando le navi erano inclinate sulle onde e le antenne ad alta larghezza di banda non erano puntate l'una verso l'altra.
Ciò che alla fine si desiderava era un sistema in grado di raccogliere informazioni sui bersagli da qualsiasi sensore della flotta, utilizzarle per costruire un'unica immagine condivisa dello spazio della battaglia e quindi distribuire tali dati in modo accurato e automatico a tutte le navi. Poiché i dati venivano raccolti quasi interamente da dispositivi e display elettronici, un sistema che raccogliesse questi dati direttamente da quei display sarebbe stato l’ideale.
Sistemi precedenti
Il sistema semiautomatico di controllo degli intercettori aerei - 1951
Nel 1951 McNally ritenne che il dispositivo fosse pronto per una valutazione a bordo di una nave come elaboratore di dati radar, con l'aggiunta della capacità di eseguire calcoli di controllo vettoriale degli intercettori, e informò i suoi sponsor del ramo di progettazione radar della BuShips. La loro preoccupazione era la limitata capacità di tracciamento del dispositivo, unita al timore che un computer digitale basato su tubi a vuoto, abbastanza potente da gestire un carico di tracciamento tattico realistico di un centinaio o più di bersagli, sarebbe stato troppo ingombrante per l'uso imbarcato. BuShips decise di sperimentare il concetto su di un'applicazione più limitata, il controllo dell'intercettazione aerea, in cui il sistema doveva tenere traccia almeno di due soli velivoli: il bersaglio e un intercettore controllato.
L'Ufficio stipulò un contratto con la società Teleregister per utilizzare i concetti del Coordinated Display Equipment in un dispositivo elettronico digitale automatizzato per il tracciamento dei dati radar e il calcolo del vettore di controllo degli intercettori. Il team CDE del Navy Electronics Lab fu incaricato di fornire una direzione tecnica a Teleregister per la progettazione e la produzione del sistema di controllo semiautomatico delle intercettazioni aeree. Anche se il concetto era teoricamente valido e gli esperti ingegneri del laboratorio erano in grado di farlo funzionare in laboratorio, sembra che la tecnologia digitale commerciale non fosse ancora sufficientemente matura per costruire un dispositivo tattico affidabile, e Teleregister non portò mai a termine il contratto. Si era trattato di una preziosa esperienza di apprendimento e di un utile passo avanti verso una soluzione praticabile.
Il sistema di visualizzazione completo della Royal Navy - 1951
L'elaborazione digitale dei dati radar fu comprensibilmente accantonata per un po' di tempo a favore di ulteriori tentativi con sistemi di calcolo analogici. La Royal Navy era sotto pressione, proprio come la Marina degli Stati Uniti, per trovare un modo di automatizzare la gestione, la manipolazione e la visualizzazione dei dati radar, e scelse fin dall'inizio di provare un approccio informatico analogico. Nel 1951 la Royal Navy assegnò un contratto all'azienda elettronica Elliot Brothers, Ltd. per sviluppare e produrre un sistema di questo tipo per le principali navi da combattimento. Il sistema fu chiamato Comprehensive Display System (CDS).
Il CDS era per certi versi simile alla precedente versione analogica dell'apparecchiatura di visualizzazione coordinata del Navy Electronics Lab, in quanto le tensioni analogiche in corrente continua rappresentavano le coordinate X e Y dei bersagli. L'apparecchiatura britannica utilizzava le tensioni per posizionare potenziometri meccanici controllati da servo che rappresentavano le coordinate della traccia, anziché i banchi di condensatori del sistema NEL. Ogni canale di tracciamento CDS aveva i propri potenziometri X e Y e il sistema utilizzava interruttori a gradino per campionare, in sequenza, i canali di tracciamento e inviare le tensioni delle coordinate agli schermi radar degli utenti, dove le tracce memorizzate venivano mostrate come simboli di bersaglio sovrapposti al video radar in diretta.
Ogni canale di tracciamento aveva anche una serie di interruttori con cui gli operatori potevano inserire dati di amplificazione sulla traccia, come il numero di traccia, l'identità, se il blip radar era giudicato uno, pochi o molti bersagli singoli, se si stimava che si trovasse a bassa, media o alta quota, se era in uno stato di emergenza e se era impegnato da armi. Il sistema di produzione aveva canali per 96 tracce, un numero rispettabile, e gli utenti potevano selezionare ogni singolo simbolo di bersaglio su di una console utente e leggerne le informazioni di amplificazione (impostazioni degli interruttori) su un tubo di lettura dei dati installato accanto a ciascuna console utente.
La Royal Navy iniziò la valutazione in mare del Comprehensive Display System a bordo della portaerei HMS Victorious nel 1957. I valutatori riscontrarono che il sistema era decisamente un miglioramento rispetto al corrente processo di tracciatura e registrazione manuale dei radar e la RN ha ordinato altre cinque suite dell'apparecchiatura che vennero installate su quattro cacciatorpediniere missilistici guidati della classe County e sulla portaerei HMS Hermes.
Il Naval Research Laboratory e il suo sistema di elaborazione dati elettronici - 1953
La Marina statunitense osservò con grande interesse lo sviluppo del Comprehensive Display System britannico, al punto che nel 1951 il Bureau of Ships acquistò una suite di CDS dalla Elliot Brothers per valutarla. Il Bureau incaricò il Naval Research Laboratory di installare il sistema presso l'NRL Chesapeake Bay Annex e di valutarlo. I test, eseguiti sotto la supervisione del capo scienziato dell'Annex Albert C. Grosvenor, confermarono che, quando funzionava correttamente, il sistema migliorava effettivamente la gestione, la visualizzazione e l'uso tempestivo dei dati radar.
Grosvenor aveva anche stabilito che il CDS soffriva di problemi di affidabilità dovuti all'elevato numero di parti meccaniche in movimento. Inoltre, fu riscontrato che le impostazioni dell'apparecchiatura erano sballate a causa delle variazioni di temperatura, che le misurazioni e la memorizzazione delle coordinate mancavano della precisione necessaria e che un sistema in grado di elaborare le circa 200 tracce richieste dalla US NAVY avrebbe richiesto una quantità inaccettabile di peso e volume a bordo della nave, per non parlare dei costi elevati. Il laboratorio raccomandò alla Marina di sviluppare una versione completamente elettronica del CDS, che avrebbe potuto alleviare la maggior parte dei problemi riscontrati con il CDS, in particolare la scarsa affidabilità. Nel 1953 il Bureau autorizzò l'NRL a iniziare lo sviluppo del proposto "Electronic Data System (EDS)" sotto la guida di Grosvenor.
Nel frattempo, a partire dal 1951, il Bureau of Ships Radar Development Branch aveva in corso un progetto per comprendere meglio il flusso e la gestione dei dati radar e di gestione della battaglia coinvolti nella difesa antiaerea delle task force. Il progetto si chiamava COSMOS e prevedeva contratti con i laboratori RCA e Bell Telephone, oltre che con i laboratori della Marina, per misurare e registrare i flussi di dati all'interno di una nave e di una task force in un impegno antiaereo. Le misurazioni iniziarono con il rilevamento del bersaglio, per poi procedere con i requisiti di archiviazione dei dati del bersaglio, l'assegnazione del numero di traccia, le misurazioni dell'altitudine del bersaglio, la stima delle dimensioni del raid, l'assegnazione dell'identità, la determinazione dei mittenti e degli utenti dei dati radar, i volumi dei flussi di dati tra questi punti e i requisiti delle comunicazioni tra navi. Oltre alla simulazione e alla modellazione a terra, gli ingegneri del contraente COSMOS erano saliti a bordo delle navi durante le esercitazioni di guerra antiaerea della task force, dove osservarono e misurarono le operazioni e le comunicazioni. Anche gli ingegneri del Naval Research Laboratory EDS parteciparono alle esercitazioni COSMOS utilizzando i risultati per contribuire a determinare le capacità necessarie del Sistema Dati Elettronici.
Al posto di un cursore elettromeccanico, il Sistema Dati Elettronico utilizzava una lastra di vetro conduttore posta sopra il cannocchiale radar. Quando un operatore toccava la piastra con una sonda nel punto in cui si trovava il blip video di un bersaglio, venivano generate delle tensioni che rappresentavano le coordinate X e Y del bersaglio e che venivano memorizzate in banchi di memoria a condensatori. I banchi di condensatori erano anche in grado di misurare e conservare le variazioni delle tensioni delle coordinate quando l'operatore aggiornava le posizioni della traccia su sweep radar successivi, e queste variazioni di tensione erano, ovviamente, proporzionali alle coordinate della velocità della traccia. Questa funzione conferiva molti vantaggi, tra cui: la possibilità per gli utenti di vedere la rotta e la velocità del bersaglio, l'aggiornamento automatico della posizione del simbolo del bersaglio artificiale sul cannocchiale e l'utilizzo delle informazioni sulla velocità del bersaglio per calcolare automaticamente la velocità e i vettori di direzione dell'intercettore. La funzione di aggiornamento automatico dei simboli consentiva a un operatore di tracking di aggiornare fino a otto tracce di bersagli alla volta, rispetto ai due bersagli alla volta del Comprehensive Display System.
Forse la cosa migliore era che l'EDS comprendeva un collegamento dati inter-nave con convertitori analogici-digitali all'estremità di invio, che convertivano le tensioni delle coordinate del bersaglio in formato telescrivente, e convertitori digitali-analogici all'estremità di ricezione, che riconvertivano il formato telescrivente in tensioni analogiche. Queste tensioni venivano immesse direttamente nei banchi di memoria dei condensatori EDS della nave ricevente, in modo che i bersagli della nave inviante venissero visualizzati sui display radar di tutte le navi partecipanti come simboli artificiali. In questo modo le navi partecipanti potevano condividere il carico di tracciamento della task force. Qualsiasi circuito di telescrivente poteva servire come mezzo di comunicazione.
La valutazione a terra dimostrò che il sistema elettronico dei dati aveva un'affidabilità nettamente superiore rispetto al CDS, oltre a miglioramenti in termini di peso, spazio, costi e funzionamento. Nel 1955 BuShips stipulò un contratto con Motorola Corporation per la fornitura di 20 suite di produzione EDS, la prima delle quali fu installata a bordo del cacciatorpediniere Willis A. Lee per la valutazione in mare. Quattro dei set furono installati sulle navi della Divisione Cacciatorpediniere 262 e gli altri furono installati sugli incrociatori di missili guidati per alimentare i bersagli dei loro sistemi missilistici. Nel 1959 le quattro navi della Divisione Cacciatorpediniere 262 si scambiarono automaticamente dati sui bersagli a distanze fino a 400 miglia.
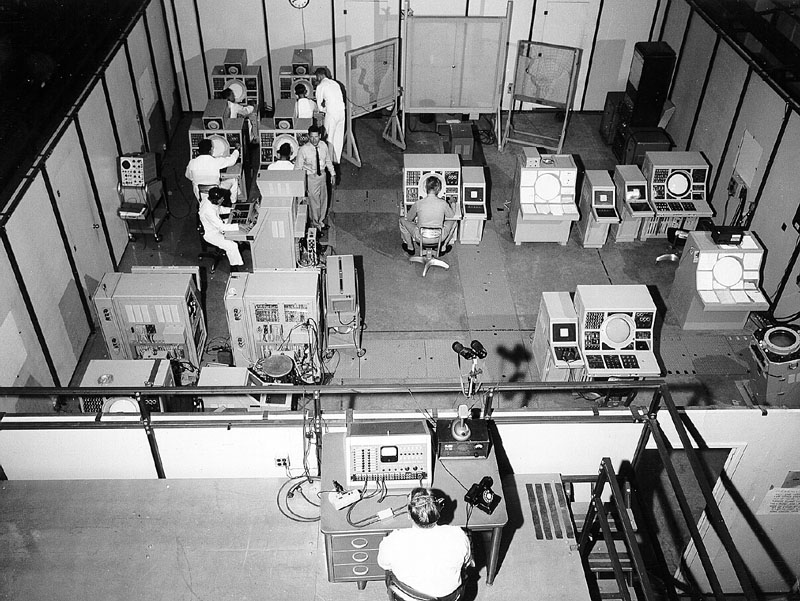
Il sistema elettronico di dati del Naval Research Laboratory nel suo sito di prova a terra. L'area di comando e decisione, con il tabellone automatico, era al centro, mentre i cannocchiali di rilevamento e inseguimento dell'operatore erano ai lati.
Anche se l'EDS rappresentava un significativo passo avanti, in particolare per quanto riguardava l'affidabilità del sistema, gli utenti ritenevano che fosse necessario un maggior numero di tracce, una maggiore precisione e un maggior numero di funzioni. I 20 esemplari acquistati all’epoca erano stati pensati principalmente come misura di ripiego in attesa della messa in campo del Naval Tactical Data System. In effetti, come vedremo in seguito, l'acquisto delle suite EDS avvenne su raccomandazione del comandante Irvin McNally, che in seguito sarebbe diventato il primo ufficiale del progetto NTDS.
INTACC, il Consiglio di Manovra per il Controllo degli Intercettori Elettronici - 1953
Abbiamo letto della delusione del Bureau nei confronti del sistema digitale di controllo semiautomatico delle intercettazioni aeree, dovuta all'immaturità della tecnologia digitale nei primi anni Cinquanta. Nel 1953 il Bureau decise di tentare di automatizzare la funzione di controllo dell'intercettazione aerea con il calcolo analogico piuttosto che con quello digitale. I Cornell Aeronautical Laboratories di Buffalo, NY, furono scelti per sviluppare una console radar che permettesse a un operatore di prelevare i dati delle coordinate di due intercettori e di due aerei bersaglio dai blip radar sulla console e di inviarli ai canali di tracciamento analogici. Dopo alcuni aggiornamenti della traccia, un computer analogico avrebbe sviluppato ordini di velocità e di rotta per i due intercettori per effettuare due intercettazioni aeree simultanee. Si trattava in sostanza di un pannello di manovra elettronico automatizzato, chiamato Intercept Tracking and Control Console (INTACC). I display visualizzavano informazioni sulla rotta e sulla velocità che il controllore dell'intercettazione aerea poteva trasmettere via radio agli intercettori. Quando fu valutato in mare, l'INTACC si rivelò un aiuto molto utile per i controllori di intercettazione aerea e fu avviato un programma per installare le console sulla maggior parte delle portaerei. La maggior parte delle navi da combattimento sarebbe stata probabilmente dotata di console se l'avvento del Naval Tactical Data System digitale non ne avesse eliminato la necessità.
Si può notare che all'inizio degli anni '50 la tecnologia di calcolo analogica regnava ancora sovrana nella Marina degli Stati Uniti. Il servizio dovette accettare l'informatica analogica come l'unico mezzo possibile per fornire ausili automatizzati per la gestione della battaglia antiaerea, anche se si desiderava disperatamente una maggiore capacità, affidabilità e precisione dei sistemi. La sezione radar non si rendeva conto che, in fondo al corridoio dell'edificio principale del Bureau of Ships, un piccolo gruppo di ingegneri civili e di ufficiali della Marina stava tranquillamente lavorando alla soluzione digitale dei loro problemi. Erano incaricati di progettare e costruire nuovi computer digitali che, per un certo periodo, sarebbero stati tra i più potenti mai costruiti. Non potevano parlare a nessuno dei loro nuovi computer perché sarebbero stati usati, in gran segreto, dai decrittatori della Marina.
IL PRIMO SISTEMA FU IDEATO DALLA ROYAL NAVY
Ideato per essere utilizzato insieme al radar Type 984, il primo sistema di questo tipo fu sviluppato dalla Royal Navy nell'immediato dopoguerra utilizzando sistemi analogici che tracciavano la velocità di movimento dei "blip" sugli schermi radar. Gli operatori utilizzavano un joystick per allineare un puntatore con il bersaglio e quindi premevano un pulsante per aggiornare la posizione. Il circuito quindi regolava la velocità del movimento previsto del blip e visualizzava un puntatore che si muoveva nel tempo. L'aggiornamento non richiedeva più alcun input, a meno che il movimento previsto non iniziasse a differire; a quel punto era possibile utilizzare pulsanti aggiuntivi per aggiornarlo. I dati per ciascuna di queste tracce, una serie di tensioni, potevano quindi essere trasmessi intorno alla nave e, successivamente, trasmesse tra le navi utilizzando la modulazione del codice a impulsi. Ralph Benjamin aveva scoperto che la decodifica della posizione del joystick non era l'ideale e desiderava un sistema che leggesse il movimento relativo anziché la posizione assoluta e ha inventato la trackball come soluzione. I radar Type 984 e il Comprehensive Display System (CDS) furono montati sulle portaerei Eagle, Hermes e Victorious.
Questo lavoro aveva risentito dell'affidabilità dei circuiti analogici utilizzati per far funzionare il sistema. All'inizio degli anni '50 il computer digitale sembrava offrire una soluzione, non solo aumentando notevolmente l'affidabilità attraverso la rimozione di eventuali parti mobili, ma anche lavorando direttamente con i dati digitali che costituivano le trame. I dati da un computer dovevano semplicemente essere copiati direttamente su di un altro e non c'era bisogno di codificare e decodificare segnali analogici che rappresentassero quei valori. La Royal Canadian Navy ha iniziato a lavorare su un tale sistema nell'ambito del progetto DATAR, che includeva il primo esempio funzionante del concetto di trackball. Sfortunatamente il loro progetto utilizzava tubi e la macchina risultante era così grande da occupare quasi tutto lo spazio libero sulla classe Bangor dragamine su cui è stato installato. Gli sforzi per costruire una versione transistorizzata del DATAR non ricevettero finanziamenti e il progetto venne terminato.
Implementazione del sistema
Il lavoro dei team RN e RCN era ben noto all'USN a partire dal 1946 e includeva dimostrazioni dal vivo del sistema canadese sul lago Ontario. Avevano anche costruito la loro versione del concetto della Royal Navy come "Electronic Data System", e alla fine 20 set furono prodotti dalla Motorola. Nel 1953 produssero un nuovo sistema per la direzione aerea noto come "Intercept Tracking and Control Console" che poteva tracciare due formazioni in entrata e due in uscita (intercettori). Tuttavia, il sistema era enorme e non includeva la trasmissione tra le navi, quindi veniva utilizzato solo su un piccolo numero di portaerei.
Tuttavia, tutte queste soluzioni presentavano problemi che ne limitavano l'utilità. I sistemi analogici erano difficili da mantenere operativi e soggetti a errori quando la manutenzione non era perfetta. La versione canadese, che utilizzava computer digitali, era migliore, ma doveva essere transistorizzata. Anche la US Air Force fu coinvolta nel proprio Project Charles, un sistema simile ma su scala molto più ampia. Il loro sistema utilizzava anche tubi a vuoto e sarebbe finito per essere il computer più grande mai costruito, occupando ciascuno 20.000 piedi quadrati (1.900 m2) di superficie, pesando 150 tonnellate e consumando 1,5 megawatt di energia elettrica. La Marina aveva tenuto d'occhio questi sviluppi e altri nell'ambito del Progetto Cosmos.
Lo sviluppo dei computer a metà degli anni '50, guidato sia dal lungo interesse della Marina per i computer che decifravano i codici, sia dall'introduzione di nuovi tipi di transistor e dalla diffusa introduzione della memoria di base, raggiunse un punto in cui una versione della Marina della difesa aerea SAGE dell'Air Force rete era una possibilità pratica. La Marina iniziò lo sviluppo del sistema NTDS utilizzando un computer digitale a transistor nel 1956. Con l’NTDS e collegamenti dati wireless, le navi potevano condividere le informazioni raccolte dai loro sensori con altre navi in una task force. Nell'ottobre 1961, l’NTDS fu imbarcato sulla portaerei USS Oriskany e sulla USS King e sul caccia USS Mahan come navi di prova e di servizio. I primi NTDS di produzione furono ordinati per 17 navi ad alta priorità con missili, inclusi 10 incrociatori di classe Belknap in costruzione tra il 1962 e il 1967. L’NTDS è stato l'ispiratore dell’attuale sistema Aegis entrato in servizio negli anni '80.
Descrizione dell’hardware
Una varietà di computer integrati UNIVAC, inclusa la prima versione messa in campo della fine degli anni '50, il CP-642A ( AN/USQ-20 ), tipicamente con 30 parole bit, 32K parole di memoria a nucleo magnetico o film sottile, 16 parallele utilizzavano canali I/O (anch'essi larghi 30 bit) collegati a radar e altre periferiche e un set di istruzioni. I circuiti logici utilizzavano transistor discreti e altri elementi saldati a un circuito stampato con connettori che corrono lungo un lato. Ogni carta era stata rivestita con una sostanza simile ad una vernice per prevenire l'esposizione alla nebbia salina che induceva la corrosione (vedi Rivestimento conforme). Un certo numero di carte vennero collegate e fissate a un vassoio su rulli. A loro volta, diversi vassoi di vario tipo, interconnessi e fissati a un involucro metallico, costituivano il computer. La maggior parte dei computer NTDS erano raffreddati ad acqua, anche se alcuni modelli successivi più leggeri erano raffreddati ad aria.
Seymour Cray e l’NTDS
Seymour Cray è accreditato per lo sviluppo del primo processore NTDS, l'AN/USQ-17. Tuttavia, questo design non è mai entrato in produzione.
Sistema di comando e controllo delle navi ASW.
L’ASW Ships Command & Control System (ASWSC&CS) era un sistema NTDS per la guerra antisommergibile (ASW). Fu imbarcato solo sulle fregate USS Voge, USS Koelsch e sulla portaerei ASW USS Wasp nel 1967. L'ASWSC&CS ha consentito lo sviluppo di miglioramenti nella guerra antisommergibile utilizzando computer digitali, che furono implementati in altre classi di navi ASW. L'UNIVAC fu scelto definire l'hardware e sviluppare il software per incorporare le funzioni ASW.
L’AN/UYQ-100 Undersea Warfare Decision Support System (USW-DSS) è l'attuale sistema messo in campo nel 2010…..
….La guerra all’Ucraina ci deve insegnare che, se vuoi vivere in pace,
devi essere sempre pronto a difendere la tua Libertà….
La difesa è per noi rilevante
poiché essa è la precondizione per la libertà e il benessere sociale.
Dopo alcuni decenni di “pace”,
alcuni si sono abituati a dare la pace per scontata:
una sorta di dono divino
e non, un bene pagato a carissimo prezzo dopo due devastanti conflitti mondiali.
….Basta con la retorica sulle guerre umanitarie e sulle operazioni di pace.
La guerra è guerra. Cerchiamo sempre di non farla, ma prepariamoci a vincerla…
(Fonti: Web, Google, Wikipedia, You Tube)


sdf.jpeg)






asd.jpeg)






















.svg.png)











_underway_in_Hampton_Roads_on_6_September_1955_(NH_94158).jpeg)







