Il Savoia-Marchetti S.81 Pipistrello fu un bombardiere, trimotore e monoplano ad ala bassa, sviluppato dall'azienda aeronautica italiana Savoia-Marchetti nei primi anni trenta.
Operò nella Guerra civile spagnola, in quella d'Etiopia e durante la Seconda guerra mondiale, venendo relegato a compiti di trasporto verso la fine della sua carriera.
Storia del progetto
Progettato dall'ing. Marchetti e sviluppato parallelamente al Savoia-Marchetti S.M.73, era un monoplano ad ala bassa con carrello fisso, a costruzione e rivestimento misti. Messo a punto il progetto, furono predisposte due linee di fabbricazione parallele: una per l'S.73 destinato al trasporto civile e l'altra per l'S.81 bombardiere con possibilità di rapida trasformazione in velivolo da trasporto. Tale fu la fortuna di questi modelli, che, per far fronte alle commesse, se ne fecero fabbricare anche da altre ditte, come Piaggio, Aer Macchi, Ausa, Breda e CRDA.
Il prototipo compì il primo volo sulla pista di Vergiate l'8 febbraio 1935 ai comandi del pilota collaudatore Adriano Bacula e, dopo essere stato positivamente valutato alla Direzione Superiore Studi ed Esperienze di Guidonia, se ne avviò la produzione in serie affidata, oltre che alla SIAI, ad altre sette ditte allo scopo di disporre di un buon numero di esemplari in breve tempo. I collaudi dimostrarono che si trattava di un apparecchio robusto, affidabile e dotato di notevoli caratteristiche aeronautiche.
L'S.M.81 non subì grosse modifiche durante la sua vita operativa, se non le numerose motorizzazioni, tutte con propulsori radiali raffreddati ad aria. Tra i più comuni i Piaggio P.X RC.35 da 700 CV e gli Alfa Romeo 125 RC.35 da 650 CV.
Una variante montò anche motori francesi a doppia stella da 14 cilindri, Gnome-Rhône 14K da 650 CV, provenienti da lotti requisiti.[2] Altre modifiche furono effettuate su apparecchi da bombardamento per la loro riconversione a trasporti, con lo sbarco degli equipaggiamenti bellici e dell'armamento difensivo, e la sostituzione della torretta dorsale semi-retrattile Breda H con una Caproni-Lanciani Delta. Nel corso del secondo conflitto mondiale ricevette il nomignolo di Pipistrello, perché impiegato in missioni notturne.
L'ala era in tre parti, bassa a sbalzo e completamente in legno, con ipersostentatori e aletta di compensazione regolabile a terra. I piani di coda erano in tubi d'acciaio rivestiti in tela, il timone di direzione era dotato di aletta servo motrice e la fusoliera era in traliccio di tubi metallici saldati e rivestita in compensato e tela. Il carrello d'atterraggio era fisso e aveva ruote indipendenti carenate munite di freni pneumatici.
Impiego operativo
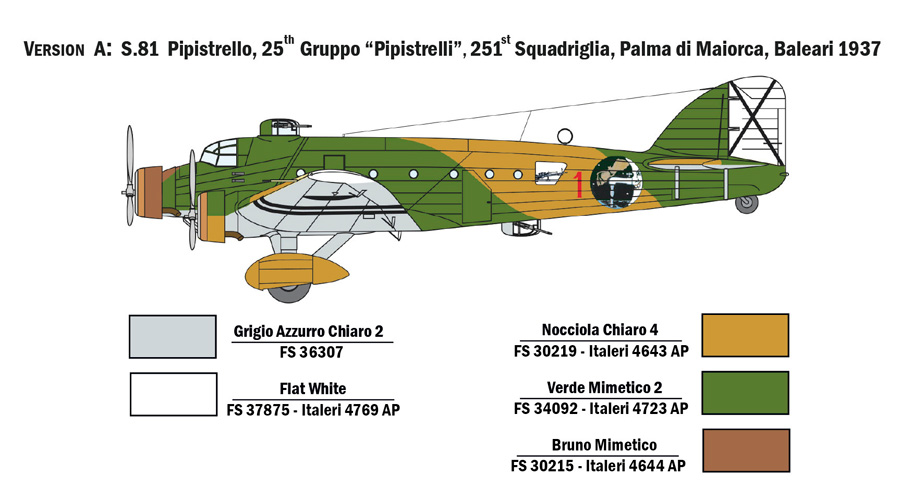
Nel 1935 era in dotazione alla 20ª Squadriglia e 21ª Squadriglia. L'S.M.81 fece in tempo ad intervenire negli ultimi giorni della campagna di Abissinia, più a scopo propagandistico che per reali esigenze nell'11ª Squadriglia, 13ª Squadriglia e 62ª Squadriglia. In questa fase operò anche con la 63ª Squadriglia come ricognitore e trasporto. Nel corso dello stesso anno (1936) fu il primo aereo militare italiano ad essere inviato da Mussolini in aiuto della rivolta del generale Francisco Franco in Spagna. Assieme a modelli più recenti operò intensamente durante tutta la guerra civile spagnola. Particolarmente attive furono le squadriglie basate nelle isole Baleari, impegnate a colpire sistematicamente la città di Barcellona.
All'epoca della sua entrata in servizio era uno dei più moderni bombardieri del mondo, e alla vigilia della seconda guerra mondiale, benché ormai superati, circa 300 S.M.81 armavano ancora numerose squadriglie da bombardamento in Africa settentrionale italiana, Albania, Egeo e Africa Orientale Italiana. Al 10 giugno 1940 erano disponibili ancora 294 S.M.81, relegati per lo più all'impiego notturno. Ma i primi aerei italiani ad entrare in azione in Africa Orientale furono - di giorno - proprio due S.M.81. L'11 giugno 1940, uno attaccò Porto Sudan e l'altro svolse una missione di ricognizione sul Mar Rosso. Quella stessa notte, tre "Pipistrelli" decollarono per bombardare Aden, ma uno tornò indietro e un altro impattò contro una collina vicino a Massaua mentre tentava un atterraggio. Ritirato dalla prima linea entro la fine 1940 trovò un utile impiego come aereo da trasporto. Ne furono assegnati alcuni esemplari all'Iraq, impegnato vanamente nel 1941 in una guerra come alleato dei nazifascisti.
Dopo l'armistizio del settembre 1943, 4 esemplari continuarono ad operare con l'Aeronautica Cobelligerante Italiana fino al dicembre 1944 Gli esemplari rimasti a nord vennero utilizzati dal Gruppo Aerotrasporti Capitano 'Felice Terracciano' dell'Aeronautica Nazionale Repubblicana. Il reparto, costituitosi nel novembre 1943 ed equipaggiato anche con Junkers Ju 52/3m, operò sul fronte orientale.
Il reparto volò con insegne tedesche, sotto la designazione Transportgruppe 10. Nel giugno 1944, 19 S.M.81 trasportarono dall'Estonia a Immola, in Finlandia, il personale tecnico della "combat force" Gefechtsverbvand Kuhlmet, equipaggiata con Focke-Wulf Fw 190 e Junkers Ju 87 Stukas, destinata a rafforzare l'aeronautica finlandese a fronte dell'offensiva sovietica.[5] Il Transportgruppe 10 operò in Finlandia fino al novembre 1944. Un numero modesto di "Pipistrelli" sopravvisse alla guerra e restò in servizio in Italia fino al 1950.
Incidente di Roccagorga
Il velivolo Savoia Marchetti S.M.81 fu protagonista di un grave incidente avvenuto nella cittadina di Roccagorga in provincia di Latina il 10 novembre 1936. Durante una esercitazione di lunga navigazione e addestramento strumentale, un trimotore S.M.81, gregario di una pattuglia da bombardamento, causa una forte perturbazione, virò verso Roccagorga ed entrò in avaria, precipitando nei pressi della principale piazza cittadina, in via Cristoforo Colombo. L'impatto fu tremendo e provocò vittime sia tra i membri dell'equipaggio che tra i civili. Le cronache parlano di 16 vittime tra cui 6 abitanti di Roccacorga morti nel tentativo di salvare i membri dell'equipaggio intrappolati nel relitto. Si trattò del più grave incidente aereo dell'aviazione fascista.
Sul luogo verso sera giunse personalmente Mussolini accompagnato dal prefetto di Littoria e da alcuni alti ufficiali, per constatare i danni provocati dall'incidente e rendere omaggio alle vittime militari e civili deposte nella chiesa dei SS. Leonardo ed Erasmo.
Tra i militari componenti l'equipaggio morirono nell'incidente il secondo pilota s.te Andrea Luigi Fumo ed il s.te Corrado Ciani.
Varianti
S.M.81B - prototipo bimotore con muso vetrato; motori Isotta-Fraschini Asso XI RC da 840 CV ciascuno.
Utilizzatori
- Repubblica di Cina - Chung-Hua Min-Kuo K'ung-Chün
- Italia - Regia Aeronautica - Aviazione Legionaria
- Italia - Aeronautica Militare - Repubblica Sociale Italiana - Aeronautica Nazionale Repubblicana
- Spagna - Aviación Nacional
- Spagna - Ejército del Aire.
ENGLISH
The Savoia-Marchetti SM.81 Pipistrello (Italian: bat) was the first three-engine bomber/transport aircraft serving in the Italian Regia Aeronautica. When it appeared in 1935, it represented a real step ahead in Italian military aviation: it was fast, well armed and had a long range. It proved effective during the war with Ethiopia and the Spanish Civil War. Despite being too slow to remain competitive as a bomber in the later years of World War II, it was one of the most flexible, reliable and important aircraft of the Regia Aeronautica from 1935 to 1944, and adapted to second-line duties in a wide range of tasks.
Design and development
The SM.81 was a militarised version of Savoia-Marchetti's earlier SM.73 airliner, having cantilever wings, three engines and a fixed undercarriage. The origins of this version were in pursuit of the interests of Italo Balbo, a brilliant exponent of the Fascist regime (but nevertheless "exiled" in Libya by Mussolini), who required a fast and efficient aircraft that was capable of serving the vast Italian colonies in Africa.
The SM.81 had wings that were roughly similar to those of the double-fuselage S.55, and identical to those of the S.73, but had a much simpler fuselage. Around six months after the SM.73s first appearance, the SM.81 prototype (MM.20099) first flew from Vergiate, near Varese, on 8 February 1934, controlled by test pilot Adriano Bacula. The first serie, ordered in 1935, was for 100 aircraft and was quickly put into production as a result of the international crisis and the embargo caused by the war in Ethiopia. The first examples were sent to 7 Wing at Campo della Promessa airbase near Lonate Pozzolo.
Although it was quickly superseded as a front-line bomber, the SM.81 continued to serve as a transport by virtue of its wide fuselage, which allowed it to accommodate a wide range of armament. Apart from its speed, it was generally superior to the SM.79 Sparviero as a multirole aircraft.
Overall characteristics
The SM.81 was a robust, three-engine monoplane, with a fixed tailwheel undercarriage, with the mainwheels enclosed by large spats to reduce drag, and had a crew of six. The aircraft was of mixed construction: the fuselage had a framework of steel tubes with a metallic-covered aft portion, while the rest was wood- and fabric-covered. It had a relatively large fuselage, an unnecessary characteristic for a bomber, which determined its future as a transport aircraft. Since the engines were quite small, the fuselage did not blend well with the nose engine, even less so than the SM.79. Many windows were present to provide the fuselage interior with daylight, giving the impression that it was a passenger aircraft.
The all-wooden wings had three spars to provide the necessary support, whereas the semi-elliptical tail surfaces were fabric-covered metal. The pilot and co-pilot were seated side-by-side in an enclosed cockpit, with separate cabins for the flight engineer and the radio-operator/gunner behind the cockpit.[5] The bomb bay was behind the cockpit, together with a passage which linked the mid and aft fuselage, where there were three further defensive positions.
The bombardier's position was located just below the cockpit, in a semi-retractable gondola, and differed from that of the SM.79, being both larger and in a location which was more favourable for communicating with the crew, and provided excellent visibility thanks to the glazed panel. Both this position and the cockpit had escape hatches, but for normal entry and exit there was a door in the left, mid-fuselage, and one in the aft fuselage. Equipment included an RA 350I radio-transmitter, AR5 radio-receiver, and a P63N radiocompass (not always fitted), while other systems comprised an electrical generator, fire extinguishing system, and an OMI 30 camera (in the gunner's nacelle).
The aircraft, having a large wing and robust undercarriage, was reliable and pleasant to fly, and could operate from all types of terrain. It was surprisingly fast for its time and, given the power of its engines, especially compared to the similar Junkers Ju 52. It was better armed than the SM.79, but the increased drag combined with the same engine power reduced the maximum speed and cruise speeds as well as the range. No armour was fitted, except for the self-sealing fuel tanks.
Armament
The SM.81 was equipped with six machine guns providing a heavy defensive armament for a 1935 aircraft. Two powered retractable turrets, one dorsal (just behind the pilots' seats) and one ventral-aft, were each fitted with 7.7 mm (0.303 in) Breda-SAFAT machine guns, while single 7.7 mm (.303 in) Lewis Guns were mounted to fire through lateral hatches. The turrets were rotated by a "Riva-Calzoni" hydraulic system, while the guns' elevation was manual, and manual back-up mechanisms were provided for both the retracting and rotating systems. Once retracted, only the upper part of the turret was visible, with the gun barrels positioned vertically, one aft of the other to reduce drag, giving the impression that the aircraft had additional antennae. Given the SM.81's cruise speed of around 270 km/h (170 mph) and the presence of a massive fixed undercarriage, the aerodynamic gain was relatively small.
The ventral turret was operated in a different fashion to those fitted to other aircraft where the gunner occupied the ball- or dustbin-shaped structure; instead, due to lack of space, the gunner crouched in the fuselage with his head down inside the turret. This proved not to be very effective as were most ventral turrets, and they were not fitted to further Savoias, although Piaggio fitted a dustbin-style turret accommodating the gunner to their P.108.
Both flanks were covered by one single and one twin gun installation. Initially six 7.7 mm (.303 in) Vickers machine guns were fitted, but these were later replaced by reliable, if not very fast-firing models made by Breda, together with 500 rounds per gun.
The SM.81's bomb bay was divided into two parts with a passage linking aft and mid fuselage between, and could accommodate a wide range of ordnance up to a total of 2,000 kg (4,410 lb) over short ranges, with individual bombs of up to 500 kg (1,100 lb), arranged either horizontally or vertically:
- 4 × 500 kg (1,100 lb) (stored horizontally)
- 4 × 250 kg (550 lb) (ditto)
- 16 × 100 kg (220 lb) (stored vertically, as all the smaller ones), true weight around 130 kg (287 lb)
- 28 × 50 kg (110 lb) (true weight, around 70 kg/150 lb)
- 56 × 31 kg (68 lb), 24 kg (53 lb), 20 kg (40 lb), or 15 kg (33 lb)
- 1,008 × 2 kg (4 lb) (true weight, around 1,700 kg/3,750 lb)
- Incendiary bombs.
The bomb-release mechanism was located on the right side of the bombardier's position.
The SM.81's defensive armament was better than its successor, the SM.79, and even than that of the SM.84, although of smaller calibre, but still insufficient when faced with modern enemy fighter opposition. It was also capable of carrying a greater bombload than the SM.79, due to its wide fuselage.
Propulsion
The SM.81 had a three-engine configuration, but unlike the Sparviero, was fitted with a wide range of engines throughout its production:
- Alfa Romeo 125 RC.35, 432–507 kW (580–680 hp). 192 built.
- Gnome-Rhône 14K, 485–746 kW (650-1,000 hp).96 built.
- Piaggio P.X R.C.15, 501–522 kW (670–700 hp) – 48 built.
- Piaggio P.IX R.C.40, 507 kW (680 hp) – 140 built.
- Alfa Romeo 126 RC.34, 582–671 kW (780–900 hp), also fitted to early versions of the SM.79. 58 built.
In addition, one aircraft, the SM.81B, was built in a twin engined configuration, powered by two 627 kW (840 hp) Isotta-Fraschini Asso XI inline engines and a streamlined, glazed nose. It had inferior performance to the three engined versions and was not taken further.
Fuel
The fuel tanks, as was standard for Italian multi-engined aircraft, were metal self-sealing fuel tanks using materials developed by SEMAPE, the specialized manufacturer. Eight tanks were fitted, with six in the centre wing (4 × 150 L/40 US gallon and 2 × 1,140 L/301 US gal tanks) and two 370 L (100 US gal) tanks (or 780 L/210 US gal with Gnome-Rhône 14K engines) in the outer wings. This gave an overall fuel capacity of 3,620 or 4,400 L (960 or 1,160 US gal).
Operational history
The SM.81 first saw combat during the Second Italo-Abyssinian War, where it showed itself to be versatile serving as a bomber, transport and reconnaissance aircraft. SM.81s also fought in the Spanish Civil War with the Aviazione Legionaria and were among the first aircraft sent by the fascist powers to aid Francisco Franco.
Despite their obsolescence, by 1940, when Italy became involved in World War II, more than 300 (290–304 depending on source) SM.81s were in service with the Regia Aeronautica. The first Italian aircraft to enter action in East Africa were a pair of SM.81s. On 11 June 1940, one of them attacked Port Sudan and the other flew a reconnaissance flight over the Red Sea. That same night, three SM.81s took off to bomb Aden, but one turned back, and one of the other two hit a hill near Massawa while trying to land.[7] A further flight was concurrently deployed against Anglo-Rhodesian defensive positions in British Somaliland immediately before the decisive Battle of Tug Argan, presaging a limited role as a tactical bomber.
Its low speed and vulnerability to fighter aircraft meant that during daytime the SM.81 was restricted to second line duties, finding use as a transport. At night it was an effective bomber, particularly in the North African theatre. Anti-ship actions were also carried out, but without significant success.
Most SM.81s were withdrawn by the time of the Italian armistice of 1943, though some remained in service with both the Italian Social Republic and the Italian Co-Belligerent Air Force.
Several examples survived the war and went on to serve with the Aeronautica Militare Italiana, but by 1950 these had all been retired.
SM.81s serving in Ethiopia had the "white avorium" markings applied to distinguish them in SAR missions. The normal camouflage pattern was yellow, green and brown mimetic. The all-over dark olive green scheme was introduced later, when the aircraft were used only in transport missions.
Variants
- SM.81 - Three-engine bomber, transport aircraft, 535 built.
- SM.81B - Experimental twin-engine prototype, one built.
Operators
- Republic of China
- Chinese Nationalist Air Force received three aircraft, all were lost in training accidents in February 1938 at Yichang.
Kingdom of Italy
- Regia Aeronautica - Aviazione Legionaria 64 aircraft - Italian Co-Belligerent Air Force - Italian Social Republic - Aeronautica Nazionale Repubblicana
- Italy - Aeronautica Militare Italiana operated this type postwar.
- Spanish State
- Spanish Air Force
Specifications (Savoia-Marchetti SM.81)
General characteristics
- Crew: 6
- Length: 18.3 m (58 ft 5 in)
- Wingspan: 24 m (78 ft 9 in)
- Height: 4.3 m (14 ft 7 in)
- Wing area: 92.2 m2 (1,001 ft2)
- Empty weight: 6,800 kg (AR.125 engines) (13,900 lb)
- Loaded weight: 9,300 kg (19,000 lb)
- Max. takeoff weight: 10,505 kg (20,500 lb)
- Powerplant: 3 × Piaggio P.X R.C.15 (or Alfa Romeo 125 R.C.35, Alfa Romeo 126 R.C.34 or Gnome-Rhône 14K) radial engines, 522 kW (670 hp) each.
Performance
- Maximum speed: 320–347 km/h (211 mph)
- Range: 2,000 km ferry range, 430 km with 2,000 kg and 640 km endurance with the same load, max practical combat range 1,500 km. (1,240 mi)
- Service ceiling: 7,000 m (23,000 ft)
- Wing loading: 101 kg/m2 ()
- Power/mass: 4.9 hp/kg ()
Performance when fitted with Alfa Romeo 125 engines
- Maximum speed 340 km/h at 4,000 m
- Cruise speed 260 km/h.
- Minimum speed 110 km/h.
Climb to
- 1,000 m (3,280 ft) in 4 min 15 s
- 3,000 m (9,840 ft) in 11 min 48 s
- 5,000 m (16,400 ft) in 20 min 36 s
Armament
- 6 × 7.7 mm (.303 in) Breda-SAFAT machine guns
- Up to 2,000 kg (4,409 lb) of bombs.
(Web, Google, Wikipedia, You Tube)