L'X-20 Dyna-Soar ("Dynamic Soarer") fu un programma della United States Air Force (USAF) di sviluppo di uno spazio-plano che potesse essere utilizzato per una grande varietà di missioni militari, inclusi la ricognizione, il bombardamento, il soccorso spaziale, la riparazione dei satelliti, e il sabotaggio dei satelliti nemici.

Il progetto fu portato avanti dal 24 ottobre 1957 al 10 dicembre 1963, per una spesa di 660 milioni di dollari dell'epoca, e venne cancellato poco prima che la costruzione del primo prototipo avesse inizio.
Storia del progetto
L'origine dello sviluppo del Dyna Soar è da ricercare nel Silbervogel di Eugen Sänger, il progetto di un bombardiere tedesco durante la seconda guerra mondiale. Il progetto era di creare un bombardiere spinto da razzi, in grado di volare su lunghissime distanze, veleggiando verso il bersaglio dopo essere stato spinto a grandi velocità (>5,5 km/s) e a grandi altitudini (50–150 km) dagli stessi motori degli A-4 o A-9.
Dei motori a razzo avrebbero dovuto posizionare il velivolo in una traiettoria esosferica simile a quella di un missile balistico intercontinentale per poi staccarsi. Successivamente, al momento del rientro nell'atmosfera, il velivolo non avrebbe effettuato una normale procedura di rientro con progressiva diminuzione della velocità e atterraggio. Avrebbe invece usato le sue ali e parte della sua velocità per generare portanza, per spingersi nuovamente verso lo spazio.
Tutto questo sarebbe stato ripetuto più volte fino a che la velocità non fosse troppo diminuita, e il pilota costretto ad atterrare. Questo uso del "rimbalzo" ipersonico atmosferico avrebbe potuto estendere di molto il raggio d'azione dell'aereo, rispetto alla "normale" traiettoria balistica.
Tale sistema poteva rendere l'aereo in grado di colpire virtualmente qualsiasi punto nel mondo (per cui era chiamato anche "bombardiere antipodale"), a velocità ipersoniche, sarebbe stato molto difficile da intercettare; inoltre l'aereo stesso era piccolo e poco armato, in confronto ad un tipico bombardiere pesante. In aggiunta, essendo di fatto un aliante mosso da motori a razzo, l'aereo poteva essere recuperato, se usato come bombardiere guidato, o non recuperato se usato come missile non-guidato.
Dopo la seconda guerra mondiale, molti scienziati tedeschi vennero portati negli Stati Uniti e impiegati nell'operazione Paperclip dell'Office of Strategic Services (OSS). Tra di loro c'era il dottor Walter Dornberger, all'epoca il capo del programma di ricerca missilistica della Germania nazista, che aveva una profonda conoscenza del progetto del Silbervogel. Lavorando con la Bell, egli cercò di creare interesse in un progetto simile nella USAF, e altrove. Questo portò la USAF a richiedere una serie di studi di fattibilità e di progettazione - portati avanti da Bell, Boeing, Convair, Douglas, Martin, North American, Republic, e Lockheed - di veleggiatori con propulsione a razzo durante i primi anni 50:
- Bomi (Bombardiere missilistico);
- Hywards (HYpersonic Weapons Research and Development Supporting system) (Sistema ipersonico di ricerca d'arma e con possibilità di ulteriore sviluppo)
- Brass Bell, veicolo da ricognizione;
- "Robo", bombardiere a razzo.
Tecnica
Altre navette spaziali sotto sviluppo in quel periodo, come i Mercury o Vostok, erano basate su capsule spaziali che rientravano nell'atmosfera in maniera balistica. Il Dyna-Soar era molto simile a quello che sarebbe stato poi lo Space Shuttle: non solo poteva raggiungere la velocità e l'autonomia di un missile balistico intercontinentale, ma era progettato per planare sulla Terra come un normale aeroplano sotto il controllo del pilota. Sarebbe atterrato in un aeroporto, invece che per semplice caduta e apertura del paracadute. Il Dyna-Soar poteva raggiungere l'orbita terrestre, come il Mercury o Gemini. Questo fece del Dyna-Soar un progetto molto più avanzato rispetto ad altri di quel periodo per quanto riguarda il volo umano nello spazio. Una impresa molto diversa dal portare semplicemente uno o due uomini nello spazio. Le informazioni raccolte durante il programma X-20 sarebbero servite più avanti nella progettazione dello Space Shuttle. Come il più grande Shuttle sarebbe stato spinto in orbita da grandi razzi, e nel progetto definitivo avrebbe anche avuto ali a delta per gli atterraggi controllati, ma non volò mai a causa della cancellazione del programma.
Il concetto alla base dell'X-20 fu sviluppato in Germania durante la seconda guerra mondiale da Eugen Sänger e Irene Bredt come parte della proposta Silbervogel del 1941. Era un progetto per un bombardiere a razzo in grado di attaccare New York City da basi ubicate in Germania per poi atterrare da qualche parte nell'Oceano Pacifico in territori occupati dall'Impero del Giappone. L'idea era quella di utilizzare le ali del veicolo per generare portanza e tirare su una nuova traiettoria balistica, uscendo di nuovo dall'atmosfera e dando al veicolo il tempo di raffreddarsi tra i salti. Dopo la guerra, venne dimostrato che il carico di riscaldamento durante i salti era molto più alto di quanto inizialmente calcolato e avrebbe fuso il veicolo spaziale.
Dopo la guerra, molti scienziati tedeschi furono deportati negli Stati Uniti da parte del Office of Strategic Services l' Operazione Paperclip, portando con sé la conoscenza dettagliata del progetto Silbervogel. Tra questi, Walter Dornberger e Krafft Ehricke si trasferirono alla Bell Aircraft, dove, nel 1952, proposero quella che era essenzialmente una versione a lancio verticale di Silbervogel nota come "Bomber Missile" o "BoMi".
Tutti questi studi proponevano vari veicoli con propulsione a razzo che in grado di percorrere grandi distanze planando dopo essere stati portati ad alta velocità e altitudine da uno stadio di razzo. Il razzo avrebbe collocato il veicolo su di una traiettoria suborbitale, ma eso-atmosferica, risultando in un breve volo spaziale seguito dal rientro nell'atmosfera. Invece di un completo rientro e atterraggio, il veicolo avrebbe utilizzato la portanza dalle sue ali per reindirizzare il suo angolo di planata verso l'alto, scambiando la velocità orizzontale con la velocità verticale. In questo modo, il veicolo veniva di fatto "rimbalzato" di nuovo nello spazio. Mediante questo ski-glide il metodo si sarebbe ripetuto fino a quando la velocità non fosse stata sufficientemente bassa da consentire al pilota del veicolo di scegliere un punto di atterraggio e far planare il veicolo fino all'atterraggio. Questo uso del sollevamento atmosferico ipersonico significava che il veicolo poteva estendere notevolmente la sua portata su di una traiettoria balistica utilizzando lo stesso razzo.
Poiché vi era abbastanza interesse per il Bomi, nel 1956 si sviluppò in tre programmi separati:
- RoBo (Rocket Bomber), versione aggiornata di Bomi.
- Brass Bell, un veicolo da ricognizione a lungo raggio.
- Hywards (Hypersonic Weapons Research and Development Supporting system), un sistema prototipo più piccolo per sviluppare le tecnologie necessarie per Robo e Brass Bell.
Sviluppo
Alcuni giorni dopo il lancio dello Sputnik 1 il 4 ottobre 1957, il 10 ottobre o il 24 ottobre, l' USAF Air Research and Development Command (ARDC) consolidò gli studi Hywards, Brass Bell e Robo nel Dyna-Soar progetto, o Weapons System 464L, con un piano di sviluppo abbreviato in tre fasi. La proposta riunì le proposte esistenti di boost-glide in un unico veicolo progettato per svolgere tutti i compiti di bombardamento e ricognizione esaminati dagli studi precedenti e avrebbe agito come successore del programma di ricerca X-15.
Le tre fasi del programma Dyna-Soar dovevano essere un veicolo di ricerca ( Dyna-Soar I ), un veicolo da ricognizione ( Dyna-Soar II , precedentemente Brass Bell) e un veicolo che aggiungeva capacità di bombardamento strategico ( Dyna-Soar III , precedentemente Robo). I primi test di planata per Dyna-Soar I dovevano essere effettuati nel 1963, seguiti da voli a motore, raggiungendo Mach 18, l'anno successivo. Un missile planante robotico doveva essere schierato nel 1968, con il sistema d'arma pienamente operativo (Dyna-Soar III) previsto entro il 1974.
Nel marzo 1958, nove società aerospaziali statunitensi presentarono un'offerta per il contratto Dyna-Soar. Di questi, il campo venne ristretto alle proposte di Bell e Boeing. Anche se la Bell aveva il vantaggio di sei anni di studi di progettazione, il contratto per lo spazio-plano fu assegnato alla Boeing nel giugno 1959 (a quel punto il loro progetto originale era cambiato notevolmente e assomigliava molto a quello che Bell aveva presentato). Alla fine del 1961, il Titan III fu scelto come veicolo di lancio. Il Dyna-Soar doveva essere lanciato dalla Cape Canaveral Air Force Station, in Florida.
Descrizione del veicolo spaziale
Il design generale dell'X-20 Dyna-Soar fu delineato nel marzo 1960. Aveva una forma a delta ad ala bassa, con alette per il controllo piuttosto che una coda più convenzionale. La struttura della navetta doveva essere realizzata in super lega René 41, così come i pannelli della superficie superiore. La superficie inferiore doveva essere costituita da lastre di molibdeno poste sopra René 41 coibentato, mentre l'ogiva doveva essere realizzata in grafite con aste di zirconia.
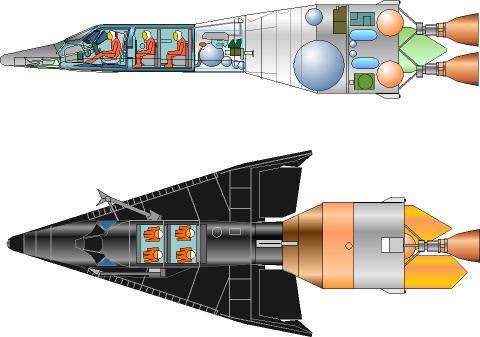
A causa delle mutevoli esigenze, furono prese in considerazione diverse versioni del Dyna-Soar, tutte con la stessa forma e layout di base. Un solo pilota sedeva nella parte anteriore, con un vano equipaggiamento situato dietro. Questa baia conteneva equipaggiamento per la raccolta dati, armi, equipaggiamento da ricognizione o un ponte centrale per quattro persone nel caso del veicolo spaziale X-20X. Uno stadio superiore Martin Marietta Transtage attaccato all'estremità posteriore del velivolo avrebbe consentito manovre orbitali e una capacità di interruzione del lancio prima di essere gettato a mare prima della discesa nell'atmosfera. Mentre cadeva attraverso l'atmosfera uno scudo termico opaco realizzato con un metallo refrattario avrebbe protetto la finestra nella parte anteriore della navetta spaziale. Questo scudo termico veniva quindi espulso dopo l' aerofrenatura in modo che il pilota potesse vedere e atterrare in sicurezza.
Un disegno sulla rivista Space/Aeronautics, prima della cancellazione del progetto, mostra il velivolo che sfiora la superficie dell'atmosfera per cambiare la sua inclinazione orbitale. Avrebbe quindi sparato il suo razzo per riprendere l'orbita. Questa poteva essere un'abilità unica per un veicolo spaziale, poiché le leggi della meccanica celeste indicano che è richiesta un enorme dispendio di energia per modificare in volo un'inclinazione orbitale una volta stabilita. Il Dyna-Soar era stato progettato per essere in grado di utilizzare questa capacità per incontrarsi con i satelliti anche se l'obiettivo avesse condotto a manovre evasive. Le forze di accelerazione sul pilota sarebbero state molto gravi durante una tale manovra.
A differenza del successivo Space Shuttle, il Dyna-Soar non avrebbe utilizzato le ruote sul suo carrello triciclo; i pneumatici avrebbero potuto prendere fuoco durante il rientro. Invece, la Goodyear ha sviluppato pattini retrattili a spazzola metallica realizzati con la stessa lega René 41 della cellula.
Storia operativa
Nell'aprile del 1960, sette astronauti furono segretamente scelti per il programma Dyna-Soar:
- Neil Armstrong (1930-2012; NASA) 1960-1962
- William H. "Bill" Dana (1930-2014; NASA) 1960-1962
- Henry C. Gordon (1925–1996; aeronautica militare) 1960–1963
- Pete Knight (1929-2004; Air Force) 1960-1963
- Russell L. Rogers (1928–1967; aeronautica militare) 1960–1963
- Milt Thompson (1926-1993; NASA) 1960-1963
- James W. Wood (1924–1990; aeronautica militare) 1960–1963.
Neil Armstrong e Bill Dana lasciarono il programma a metà del 1962. Il 19 settembre 1962, Albert Crews fu aggiunto al programma Dyna-Soar e i nomi dei sei restanti astronauti Dyna-Soar furono annunciati al pubblico.
Entro la fine del 1962, il Dyna-Soar venne designato X-20, il booster (da utilizzare nei test di caduta Dyna Soar I) venne lanciato con successo e l'USAF tenne una cerimonia di inaugurazione per l'X-20 a Las Vegas.
La Minneapolis-Honeywell Regulator Company (in seguito la Honeywell Corporation ) completò i test di volo su di un sottosistema di guida inerziale per il progetto X-20 presso la base aeronautica di Eglin, in Florida, utilizzando un NF-101B Voodoo nell'agosto 1963.
Il Boeing B-52C-40-BO Stratofortress 53-0399 fu assegnato al programma per il lancio dell'X-20, simile al profilo di lancio dell'X-15. Quando l'X-20 venne cancellato, fu utilizzato per altri test di caduta aerea, incluso quello della capsula di fuga del bombardiere B-1A.
Problemi
Oltre ai problemi di finanziamento che spesso accompagnano gli sforzi di ricerca, il programma Dyna-Soar soffrì di due problemi principali: l'incertezza sul booster da utilizzare per inviare il velivolo in orbita e la mancanza di un obiettivo chiaro per il progetto.
Furono proposti molti diversi booster per lanciare il Dyna-Soar in orbita. La proposta originale dell'USAF suggeriva motori LOX /JP-4, fluoro-ammoniaca, fluoro-idrazina o RMI (X-15), ma la Boeing, l'appaltatore principale, preferiva una combinazione Atlas - Centaur. Alla fine, nel novembre 1959, l’US Air Force scelse un razzo Titan, come suggerito dal fallito concorrente Martin, ma il Titan I non era abbastanza potente per lanciare in orbita l'X-20 del peso di cinque tonnellate.
I booster Titan II e Titan III avrebbero potuto lanciare il Dyna-Soar nell'orbita terrestre, così come il Saturn C-1 (in seguito ribattezzato Saturn I), e tutti vennero proposti con varie combinazioni di stadio superiore e booster. Nel dicembre 1961 fu scelto il Titan IIIC) ma le oscillazioni sul sistema di lancio ritardarono il progetto e complicarono la pianificazione.
L'intenzione originale del Dyna-Soar, delineata nella proposta del sistema di armi 464L, prevedeva un progetto che combinasse la ricerca aeronautica con lo sviluppo di sistemi d'arma. Molti si domandarono se l'USAF dovesse avere un programma spaziale con equipaggio, quando quello era il dominio principale della NASA. È stato spesso sottolineato dall'Air Force che, a differenza dei programmi della NASA, il Dyna-Soar consentiva il rientro controllato, ed era qui che veniva posto lo sforzo principale nel programma X-20. Il 19 gennaio 1963, il Segretario alla Difesa, Robert McNamara, ordinò all'aeronautica statunitense di intraprendere uno studio per determinare se Gemini o Dyna-Soar fosse l'approccio più fattibile a un sistema d'arma spaziale. A metà marzo 1963, dopo aver ricevuto lo studio, il segretario McNamara "dichiarò che l'Air Force aveva posto troppa enfasi sul rientro controllato quando non aveva obiettivi reali per il volo orbitale". Questo fu visto come un'inversione della precedente posizione del Segretario sul programma Dyna-Soar che era anche un programma costoso che non avrebbe lanciato una missione con equipaggio prima della metà degli anni '60. Questo alto costo e la discutibile utilità resero difficile per l'US Air Force giustificare il programma. Alla fine, il programma X-20 Dyna-Soar fu cancellato il 10 dicembre 1963.
Il giorno in cui l'X-20 venne cancellato, la US Air Force annunciò un altro programma, il Manned Orbiting Laboratory, uno spin-off di Gemini. Anche questo programma fu infine cancellato. Un altro programma nero, ISINGLASS, che doveva essere lanciato in volo da un bombardiere B-52, venne valutato e furono eseguiti alcuni lavori sul motore, ma alla fine fu anch'esso cancellato.
Eredità
Nonostante la cancellazione dell'X-20, la ricerca affiliata sugli spazio-plani influenzò lo Space Shuttle molto più grande. Il progetto finale utilizzava anche ali a delta per atterraggi controllati. Il successivo, e molto più piccolo, BOR-4 sovietico era più vicino nella filosofia progettuale al Dyna-Soar, mentre i velivoli di ricerca Martin X-23 PRIME e Martin Marietta X-24A / HL-10 della NASA esploravano anche aspetti dell'orbita suborbitale. e volo spaziale. L' ESA ha proposto che il veicolo spaziale con equipaggio denominato Hermes con un design ampliato nelle dimensioni.
Specifiche (come progettato)
Caratteristiche generali:
- Equipaggio: un pilota
- Lunghezza: 35,34 piedi (10,77 m)
- Apertura alare: 20,8 piedi (6,3 m)
- Altezza: 8,5 piedi (2,6 m)
- Area alare: 345 piedi quadrati (32,1 m2 )
- Peso a vuoto: 10.395 libbre (4.715 kg)
- Peso massimo al decollo: 11.387 libbre (5.165 kg)
- Motopropulsore: 2 × AJ10-138 motore a razzo , 8.000 lbf (36 kN) di spinta ciascuno.
Prestazioni:
- Velocità massima: 17.500 mph (28.200 km/h, 15.200 kn)
- Autonomia: 25.000 mi (41.000 km, 22.000 NMI)
- Tangenza di servizio: 530.000 piedi (160.000 m)
- Velocità di salita: 100.000 piedi/min (510 m/s)
- Carico alare: 33 lb / sq (160 kg / m2 ).
Media
L'episodio della prima stagione di Twilight Zone del 1959 intitolato " And When the Sky Was Opened " faceva riferimento a una navicella spaziale chiamata X20 che aveva un profilo simile ma poteva trasportare un equipaggio di tre persone.
Nel 1962, il quinto libro di Donald A. Wollheim s' Mike Mars serie, Mike Mars vola il Dyna-Soar, ha avuto il carattere di titolo volare una missione di salvataggio di emergenza nella Dyna-Soar.
Il racconto di John Berryman del 1963 "The Trouble with Telstar" presentava un Dyna-Soar utilizzato per intercettare i satelliti di comunicazione per la riparazione.
Il film drammatico di Hollywood del 1969 Marooned presentava un'imbarcazione di salvataggio modellata in qualche modo sul Dyna-Soar (chiamato X-RV per eXperimental Rescue Vehicle) che veniva rapidamente schierato per salvare gli astronauti a bordo di una capsula di comando dell'Apollo in avaria. Questo venne schernito in Mad Magazine come XRT, la cosa di salvataggio sperimentale.
(SVPPBELLUM, Web, Google, Wikipedia, You Tube)