

https://svppbellum.blogspot.com/
Nei primi giorni della seconda guerra mondiale, le marine alleate affrontarono una dura sfida: come rilevare la crescente flotta italo-tedesca di sottomarini e impedire loro di ripetere il caos provocato nella prima guerra mondiale. Tra il 1939 e il 1945, una nuova tecnologia, il sonar, fornì agli Alleati uno strumento importante per localizzare e affondare i sottomarini dell'Asse. Oggi, il sonar si è evoluto in un sofisticato strumento militare utilizzato da qualsiasi cosa, dai sottomarini agli elicotteri, per inseguire bersagli sia di superficie che in immersione, e tutti con un unico obiettivo: il dominio degli oceani del mondo.
L’invenzione del sonar
Negli ultimi giorni della prima guerra mondiale, le marine britannica e francese cercavano disperatamente di arginare le perdite inflitte dagli U-Boot tedeschi. I sottomarini del Kaiser, nel tentativo di sconvolgere le economie degli Alleati, avevano affondato il 30% delle navi mercantili di tutto il mondo. Un nuovo tipo di sensore, il dispositivo ASDIC (Allied Submarine Detection Investigation Committee), prevedeva il rilevamento dei sottomarini attraverso l'utilizzo del suono. Sfortunatamente questo sistema, in seguito noto come navigazione e distanza sonore, o SONAR, non fu pronto in tempo per influenzare materialmente la guerra.
Sarebbero passati altri vent'anni, durante la seconda guerra mondiale, quando il sonar si sarebbe rivelato prezioso nella caccia alla nuova generazione di sottomarini. Il sonar consentiva alle unità di scorta, alle corvette, alle fregate ed ai cacciatorpediniere alleati di rilevare anche i sottomarini immersi, quindi consentiva di attaccarli con cariche di profondità e altre armi antisommergibile. Il sonar come dispositivo di rilevamento fu ulteriormente perfezionato durante la Guerra Fredda, quando l'Unione Sovietica stabilì rapidamente la superiorità nel suo numero di sottomarini, minacciando una nuova terza battaglia dell'Atlantico.
Sonar attivi e/o passivi
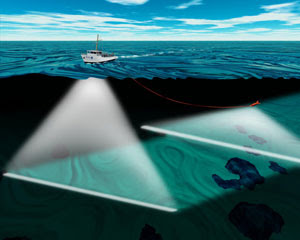
Esistono due tipi di sonar: attivo e passivo. Il sonar attivo coinvolge una nave da guerra che trasmette onde sonore dirette sott'acqua: se le onde sonore colpiscono un oggetto in immersione, vengono riflesse verso la nave trasmittente, che la registra come oggetto che vale la pena indagare. La nave può determinare la distanza dell'oggetto calcolando il tempo impiegato dalle onde sonore per tornare dall'oggetto. I ritorni ripetuti possono persino consentire ai cacciatori di determinare se un oggetto si sta muovendo, in quale direzione si stia muovendo e quanto velocemente stia andando.
Eric Moreno, un veterano della Marina degli Stati Uniti da sette anni che ha prestato servizio sulla USS Hampton: “Non esiste un modo semplice per nascondersi dal sonar attivo. Se ricevi un ping, probabilmente sei stato visto. I sottomarini hanno piastrelle fono-assorbenti attaccate all'esterno dello scafo per aiutare a smorzare il ritorno. Come gli aerei, l'unico vero modo per nascondersi è immergersi velocemente.
La flotta di sottomarini nucleari della US Navy ha sfide uniche, spiega Moreno: “I sottomarini diesel possono posarsi sul fondo e sembrare solo un'altra roccia. I sottomarini nucleari non hanno questa capacità a causa del sistema di raffreddamento del reattore. Le pompe principali del refrigerante sono sempre in funzione, quindi non puoi rischiare di sporcare le tubazioni del refrigerante con i sedimenti”.
Un sistema sonar attivo in genere coinvolge sia un trasmettitore per trasmettere potenti impulsi sonori sia un ricevitore per catturare i ritorni dell'impulso. Questa configurazione è normalmente posizionata a prua dell’unità navale, appena sotto la linea di galleggiamento. Su di un sottomarino il trasmettitore e il ricevitore del sonar attivo si trovano a prua. Il suono effettivo del sonar, a differenza del suono sordo che si sente nei film sui sottomarini, è più uno stridio ad alta frequenza. Il sonar attivo è il metodo sonar più efficace, perché può rilevare un oggetto perfettamente fermo e silenzioso nell'acqua. Un grosso problema con il sonar attivo è che le onde sonore sono rilevabili, così come sono rilevabili le onde radar e le onde luminose. Pensa a una torcia che illumina una stanza buia: mentre la luce può aiutare l'utente a cercare altre persone nella stanza, chiunque altro nella stanza può non solo vedere la luce, ma seguirla fino alla fonte, individuando la posizione del ricercatore. Il Sonar presenta essenzialmente lo stesso problema. Una nave che si allontana con il sonar attivo è rilevabile e, sebbene ciò potrebbe non essere un problema per un cacciatorpediniere, è un grosso problema per un sottomarino, che fa affidamento sulla furtività per sopravvivere. Il sonar passivo, d'altra parte, è un mezzo per rilevare le navi che non comporta la rivelazione della posizione dell'utente. È per questo motivo il metodo sonar preferito dai sommergibilisti. Il sonar passivo implica semplicemente l'ascolto, tramite idrofoni sensibili, di segni rivelatori di navi vicine. Questi segni includono i suoni dei motori delle navi e altri rumori meccanici, così come le eliche che si agitano nell’acqua, il semplice movimento degli uomini a bordo o lo sciacquone di un water! Il sonar passivo è di particolare utilità per i sottomarini, poiché consente loro di rilevare le navi nemiche senza rivelare la loro posizione. Le navi di superficie possono anche utilizzare il sonar passivo, spesso utilizzando un lungo cavo per trainare un sonar passivo lineare nelle loro scie, per ridurre al minimo il rilevamento del proprio rumore. Gli elicotteri possono librarsi e abbassare gli idrofoni in mare, ascoltando i suoni nelle acque sottostanti. Il sonar passivo è particolarmente utile per i cacciatori di sottomarini in quanto possono tracciarli senza rivelare la loro posizione. “Il sonar passivo”, spiega Moreno, “si basa sul silenzio. Se la tua unità emette il proprio rumore, un sottomarino nemico può triangolare quella posizione. I sottomarini statunitensi sono addestrati per quello che viene chiamato "Ultra silenzioso": il tempo per rompere i piatti di carta e le forchette di plastica perché pulire i piatti è rumoroso. Devi anche rimanere nella tua branda a meno che tu non sia di guardia.
Anche i rumori piccoli, altrimenti insignificanti, vengono evitati durante gli “Ultra Quiet”. “Se vedi mai un coperchio del water legato alla tubazione dietro di esso, sai perché. I sedili del water che cadono e sbattono sono tra i principali trasgressori del rumore. Una corretta lubrificazione non salva solo le articolazioni... smette di cigolare per mantenerti silenzioso e al sicuro. Il sonar è il mezzo principale, e talvolta l'unico, per rilevare i sottomarini nella guerra ASW. I limiti del mezzo, gli oceani del mondo, significano che continuerà a dominare per il prossimo futuro. Nei mondi paralleli della guerra sottomarina e antisommergibile, vale la pena ascoltare.
Applicazioni militari del sonar
Come già evidenziato, il sonar (sound navigation and rangeing o sonic navigation and going) è una tecnica che utilizza la propagazione del suono (solitamente sott'acqua, come nella navigazione sottomarina) per navigare, misurare le distanze ( ranging ), comunicare o rilevare oggetti sopra o sotto la superficie dell'acqua, come altre navi.
"Sonar" può riferirsi a uno dei due tipi di tecnologia: sonar passivo significa ascoltare il suono prodotto dalle navi; sonar attivo significa emettere impulsi di suoni e ascoltare gli echi. Il sonar può essere utilizzato come mezzo di localizzazione acustica e di misurazione delle caratteristiche dell'eco di "obiettivi" nell'acqua. La localizzazione acustica in aria è stata utilizzata prima dell'introduzione del radar. Il sonar può essere utilizzato anche per la navigazione robotica, e il SODAR (un sonar in aria rivolto verso l'alto) viene utilizzato per le indagini atmosferiche. Il termine sonar viene utilizzato anche per l'apparecchiatura utilizzata per generare e ricevere il suono. Le frequenze acustiche utilizzate nei sistemi sonar variano da molto basse (infrasuoni) a estremamente alti (ultrasuoni). Lo studio del suono subacqueo è noto come acustica subacquea o idroacustica.
Il primo utilizzo registrato della tecnica fu di Leonardo da Vinci nel 1490 che utilizzò un tubo inserito nell'acqua per rilevare i vasi a orecchio. È stato sviluppato durante la prima guerra mondiale per contrastare la crescente minaccia della guerra sottomarina, con un sistema sonar passivo operativo in uso dal 1918. I moderni sistemi sonar attivi utilizzano un trasduttore acustico per generare un'onda sonora che viene riflessa da oggetti bersaglio.
Storia
Sebbene alcuni animali delfini, pipistrelli, alcuni toporagni e altri) utilizzino il suono per la comunicazione e il rilevamento di oggetti da milioni di anni, l'uso da parte dell'uomo nell'acqua è registrato inizialmente da Leonardo da Vinci nel 1490: un tubo inserito nell'acqua era si dice che sia usato per rilevare i vasi mettendo un orecchio al tubo.
Alla fine del XIX secolo una campana subacquea veniva utilizzata come accessorio per fari o navi faro per avvisare dei pericoli.
L'uso del suono per "localizzare l'eco" sott'acqua nello stesso modo in cui i pipistrelli usano il suono per la navigazione aerea sembra essere stato suggerito dal disastro del Titanic del 1912 al British Patent Office dal meteorologo inglese Lewis Fry Richardson un mese dopo l'affondamento del Titanic, e un fisico tedesco Alexander Behm ottenne un brevetto per un ecoscandaglio nel 1913.
L'ingegnere canadese Reginald Fessenden, mentre lavorava per la Submarine Signal Company a Boston, Massachusetts, costruì un sistema sperimentale a partire dal 1912, un sistema successivamente testato nel porto di Boston, e infine nel 1914 dalla US Revenue Cutter Miami sulle Grand Banks al largo di Terranova. In quel test, Fessenden dimostrò il sondaggio di profondità, le comunicazioni subacquee (codice Morse) e la portata dell'eco (rilevando un iceberg a una distanza di 2 miglia (3,2 km). L'oscillatore "Fessenden", operato a una frequenza di circa 500 Hz, non fu in grado di determinare il rilevamento dell'iceberg a causa della lunghezza d'onda di 3 metri e della piccola dimensione della faccia radiante del trasduttore (meno di 1 ⁄ 3 di lunghezza d'onda di diametro). I dieci Montreal -costruiti I sottomarini britannici di classe H varati nel 1915 erano dotati di oscillatori Fessenden.
Durante la prima guerra mondiale la necessità di rilevare i sottomarini aveva spinto ad ulteriori ricerche sull'utilizzo del suono. Gli inglesi fecero presto uso di dispositivi di ascolto subacquei chiamati idrofoni, mentre il fisico francese Paul Langevin, che lavorava con un ingegnere elettrico immigrato russo Constantin Chilowsky, lavorò allo sviluppo di dispositivi audio attivi per rilevare sottomarini nel 1915. Sebbene i trasduttori piezoelettrici e magnetostrittivi successivamente abbiano sostituito i trasduttori elettrostatici che erano stati utilizzati, questo lavoro aveva influenzato i progetti futuri. Per gli idrofoni vennero utilizzati film plastici leggeri sensibili al suono e fibre ottiche, mentre Terfenol-D e il niobato di piombo e magnesio (PMN) fu sviluppato per i proiettori.
L’ASDIC
Nel 1916, sotto il British Board of Invention and Research, il fisico canadese Robert William Boyle intraprese il progetto di rilevamento del suono attivo con AB Wood, producendo un prototipo per i test a metà del 1917.

Questo lavoro per la divisione antisommergibile dello stato maggiore della Royal Navy britannica fu svolto nella massima segretezza e si erano utilizzati cristalli piezoelettrici di quarzo per produrre il primo pratico apparato di rilevamento del suono attivo subacqueo al mondo. Per mantenere il segreto, non venne fatta alcuna menzione di sperimentazione sonora o quarzo: la parola usata per descrivere i primi lavori ("supersonics") era stata cambiata in "ASD"ics, e il materiale di quarzo in "ASD"ivite: "ASD" per " Anti-Submarine Division", da cui l'acronimo britannico ASDIC. Nel 1939, in risposta a una domanda dell'Oxford English Dictionary, l'Ammiragliato inventò la storia che stava per "Allied Submarine Detection Investigation Committee", e questo è ancora ampiamente creduto, sebbene nessun comitato con questo nome sia stato trovato negli archivi dell'Ammiragliato.
Nel 1918, Gran Bretagna e Francia avevano costruito prototipi di sistemi attivi. Gli inglesi testarono il loro ASDIC su HMS Antrim nel 1920 e iniziarono la produzione nel 1922. La 6a flottiglia di cacciatorpediniere aveva navi equipaggiate con ASDIC nel 1923. Una scuola antisommergibile HMS Osprey e una flottiglia di addestramento di quattro navi furono istituite a Portland nel 1924.
Allo scoppio della seconda guerra mondiale, la Royal Navy aveva cinque set per diverse classi di navi di superficie e altri per sottomarini, incorporati in un sistema antisommergibile completo. L'efficacia del primo ASDIC era ostacolata dall'uso della carica di profondità come arma antisommergibile. Ciò richiedeva che una nave attaccante passasse sopra un contatto immerso prima di far cadere le cariche a poppa, con conseguente perdita del contatto ASDIC nei momenti precedenti all'attacco. Il cacciatore stava effettivamente sparando alla cieca, durante il quale un comandante di sottomarino poteva intraprendere un'azione evasiva. A questa situazione si pose rimedio con nuove tattiche e nuove armi.
I miglioramenti tattici sviluppati da Frederic John Walker, incluso l'attacco strisciante. Per questo furono necessarie due navi antisommergibile (di solito sloop o corvette). La "nave dirigente" seguiva il sottomarino bersaglio con l’ASDIC da una posizione a circa 1500-2000 iarde dietro il sottomarino. La seconda nave, con il suo ASDIC spento e funzionante a 5 nodi, iniziava l’attacco da una posizione tra la nave dirigente e il bersaglio. Questo attacco veniva controllato tramite radiotelefono dalla nave dirigente, in base al loro ASDIC ed alla portata (tramite telemetro) e al rilevamento della nave attaccante. Non appena le cariche di profondità venivano rilasciate, la nave attaccante abbandonava l'area circostante a tutta velocità. La nave dirigente quindi entrava nell'area bersaglio e lanciava alcune cariche di profondità. La bassa velocità di avvicinamento significava che il sottomarino non poteva prevedere quando sarebbero state rilasciate le cariche di profondità. Qualsiasi azione evasiva veniva rilevata dalla nave dirigente e gli ordini di governo alla nave attaccante venivano impartiti di conseguenza. La bassa velocità dell'attacco aveva il vantaggio che Il siluro acustico tedesco non era efficace contro una nave da guerra che viaggiava così lentamente. Una variazione dell'attacco strisciante era l'attacco "intonaco", in cui tre navi attaccanti che lavoravano in linea ravvicinata erano dirette sul bersaglio dalla nave dirigente.
Le nuove armi per affrontare il punto cieco dell'ASDIC erano "armi che lanciano avanti", come Hedgehogs e successivamente lo Squids, che proiettavano testate contro un bersaglio davanti all'attaccante e ancora in contatto con l'ASDIC. Questi consentivano a una singola scorta di effettuare attacchi mirati contro i sottomarini. Gli sviluppi durante la guerra avevano portato ai set ASDIC britannici che utilizzavano diverse forme di raggio, coprendo continuamente i punti ciechi. Successivamente furono usati siluri acustici .
All'inizio della seconda guerra mondiale (settembre 1940), la tecnologia ASDIC britannica fu trasferita gratuitamente negli Stati Uniti. La ricerca sull'ASDIC e sul suono subacqueo era stata approfondita nel Regno Unito e negli Stati Uniti. Furono sviluppati molti nuovi tipi di rilevamento del suono militare. Questi includevano sonobuoys, sviluppati per la prima volta dagli inglesi nel 1944 con il nome in codice High Tea, sonar a immersione / schiacciamento e sonar per il rilevamento di mine. Questo lavoro costituì la base per gli sviluppi del dopoguerra relativi al contrasto al sottomarino nucleare.
Il SONAR
Durante gli anni '30 gli ingegneri statunitensi svilupparono la propria tecnologia di rilevamento del suono subacqueo e fecero importanti scoperte, come l'esistenza dei termoclini e i loro effetti sulle onde sonore. Gli americani iniziarono a usare il termine SONAR per i loro sistemi, coniato da Frederick Hunt per essere l'equivalente subacqueo del RADAR.
Laboratorio del suono sottomarino della Marina degli Stati Uniti
Nel 1917, la Marina degli Stati Uniti acquisì per la prima volta i servizi di J. Warren Horton. In congedo dai Bell Labs, aveva servito il governo come esperto tecnico, prima presso la stazione sperimentale di Nahant, Massachusetts, e successivamente presso il quartier generale della Marina degli Stati Uniti, a Londra, in Inghilterra. A Nahant ha applicato il tubo a vuoto di nuova concezione, allora associato alle fasi formative del campo della scienza applicata ora noto come elettronica, al rilevamento di segnali sottomarini. Di conseguenza, il microfono a bottone in carbonio, che era stato utilizzato nelle precedenti apparecchiature di rilevamento, venne sostituito dal precursore del moderno idrofono. Sempre durante questo periodo, aveva sperimentato metodi per il rilevamento del traino. Ciò era dovuto alla maggiore sensibilità del suo dispositivo. I principi sono ancora utilizzati nei moderni sistemi sonar trainati.
Per soddisfare le esigenze di difesa della Gran Bretagna, fu inviato in Inghilterra per installare nel Mare d'Irlanda idrofoni montati sul fondo collegati a una postazione di ascolto a terra tramite cavo sottomarino. Mentre questa attrezzatura veniva caricata sulla nave posacavi, la prima guerra mondiale terminò e Horton tornò a casa.
Durante la seconda guerra mondiale, aveva continuato a sviluppare sistemi sonar in grado di rilevare sottomarini, mine e siluri. Pubblicò Fundamentals of Sonar nel 1957 come capo consulente di ricerca presso il US Navy Underwater Sound Laboratory. Mantenne questa carica fino al 1959 quando divenne direttore tecnico, carica che mantenne fino al pensionamento obbligatorio nel 1963.
Materiali e design negli Stati Uniti e in Giappone
Ci furono pochi progressi nel sonar statunitense dal 1915 al 1940. Nel 1940, i sonar statunitensi consistevano tipicamente in un trasduttore magnetostrittivo e una serie di tubi di nichel collegati a una piastra di acciaio del diametro di 1 piede attaccata schiena contro schiena a un cristallo di sale di Rochelle in un alloggiamento sferico. Questo gruppo penetrava nello scafo della nave e veniva ruotato manualmente all'angolazione desiderata. Il cristallo di sale piezoelettrico di Rochelle aveva parametri migliori, ma l'unità magnetostrittiva era molto più affidabile. Elevate perdite per il trasporto di rifornimenti mercantili statunitensi all'inizio della seconda guerra mondiale portarono a ricerche statunitensi ad alta priorità su larga scala nel campo, perseguendo sia miglioramenti nei parametri del trasduttore magnetostrittivo che nell'affidabilità del sale di Rochelle. Ammonio di idrogeno fosfato (ADP), un'alternativa superiore, fu trovata in sostituzione del sale di Rochelle; la prima applicazione era stata una sostituzione dei trasduttori Rochelle-salt a 24 kHz. Entro nove mesi, il sale di Rochelle era già obsoleto. L'impianto di produzione ADP era cresciuto da poche decine di dipendenti all'inizio del 1940 a diverse migliaia nel 1942.
Una delle prime applicazioni dei cristalli ADP furono gli idrofoni per le miniere acustiche; i cristalli erano specificati per l'interruzione delle basse frequenze a 5 Hz, per resistere agli urti meccanici per il dispiegamento da aerei da 3.000 m (10.000 piedi) e per la capacità di sopravvivere alle esplosioni di mine vicine. Una delle caratteristiche chiave dell'affidabilità dell'ADP era la sua caratteristica di invecchiamento zero; il cristallo mantiene i suoi parametri anche in caso di conservazione prolungata.
Un'altra applicazione era per i siluri a ricerca acustica. Sul muso del siluro erano montate due coppie di idrofoni direzionali, sul piano orizzontale e verticale; i segnali di differenza delle coppie venivano utilizzati per guidare il siluro sinistra-destra e su-giù. Fu subito sviluppata una contromisura: il sottomarino preso di mira scaricava una sostanza chimica effervescente e il siluro inseguiva l'esca frizzante più rumorosa. La contromisura era un siluro con sonar attivo: un trasduttore venne aggiunto al naso del siluro ed i microfoni ascoltavano i suoi toni periodici riflessi. I trasduttori comprendevano lastre di cristallo rettangolari identiche disposte in aree a forma di diamante in file sfalsate.
Gli array sonar passivi per sottomarini sono stati sviluppati da cristalli ADP. Diversi assemblaggi di cristallo venivano disposti in un tubo d'acciaio, riempito sottovuoto con olio di ricino e sigillato. I tubi venivano quindi montati in array paralleli.
Il sonar a scansione standard della Marina degli Stati Uniti alla fine della seconda guerra mondiale operava a 18 kHz, utilizzando una serie di cristalli ADP. La portata più lunga desiderata, tuttavia, richiedeva l'uso di frequenze più basse. Le dimensioni richieste erano troppo grandi per i cristalli ADP, quindi all'inizio degli anni '50 furono sviluppati sistemi piezoelettrici magnetostrittivi e titanato di bario, ma questi avevano problemi ad ottenere caratteristiche di impedenza uniformi e lo schema del raggio ne risentiva. Il titanato di bario fu quindi sostituito con titanato di zirconato di piombo più stabile (PZT) e la frequenza venne abbassata a 5 kHz. La flotta statunitense ha utilizzato questo materiale nel sonar AN/SQS-23 per diversi decenni. Il sonar SQS-23 utilizzava per la prima volta trasduttori di nichel magnetostrittivi, ma questi pesavano diverse tonnellate e il nichel era costoso e considerato un materiale critico; furono quindi sostituiti i trasduttori piezoelettrici. Il sonar utilizzava una vasta gamma di 432 singoli trasduttori. All'inizio i trasduttori erano inaffidabili, mostravano guasti meccanici ed elettrici e si deterioravano subito dopo l'installazione; inoltre erano prodotti da diversi fornitori, avevano design diversi e le loro caratteristiche erano abbastanza diverse da compromettere le prestazioni dell'array. La politica per consentire la riparazione dei singoli trasduttori venne quindi sacrificata e si scelse invece il "design modulare sacrificabile", moduli sigillati non riparabili.
La marina imperiale giapponese all'inizio della seconda guerra mondiale utilizzava proiettori a base di quarzo. Questi erano grandi e pesanti, specialmente se progettati per le frequenze più basse; quello per il set Type 91, operante a 9 kHz, aveva un diametro di 30 pollici (760 mm) ed era pilotato da un oscillatore con 5 kW di potenza e 7 kV di ampiezza di uscita. I proiettori Type 93 erano costituiti da solidi sandwich di quarzo, assemblati in corpi di ghisa sferica. I sonar Tipo 93 furono successivamente sostituiti con i Tipo 3, che seguiva il design tedesco e utilizzava proiettori magnetostrittivi; i proiettori consistevano in due unità indipendenti rettangolari identiche in un corpo rettangolare in ghisa di circa 16 x 9 pollici (410 mm × 230 mm). L'area esposta era larga metà della lunghezza d'onda e alta tre lunghezze d'onda. I nuclei magnetostrittivi erano stati ricavati da stampaggio di 4 mm di nichel, e successivamente di una lega ferro-alluminio con contenuto di alluminio compreso tra il 12,7% e il 12,9%. La potenza veniva fornita da una sorgente da 2 kW a 3,8 kV, con polarizzazione da una sorgente CC da 20 V, 8 A.
Gli idrofoni passivi della Marina imperiale giapponese erano basati su un design a bobina mobile, trasduttori piezoelettrici al sale Rochelle e microfoni in carbonio.
Sviluppi successivi nei trasduttori
I trasduttori magnetostrittivi furono perseguiti nel secondo dopoguerra come alternativa a quelli piezoelettrici. I trasduttori ad anello avvolto in nichel sono stati utilizzati per operazioni a bassa frequenza ad alta potenza, con dimensioni fino a 13 piedi (4,0 m) di diametro, probabilmente i più grandi trasduttori sonar individuali mai realizzati. Il vantaggio dei metalli è la loro elevata resistenza alla trazione e la bassa impedenza elettrica di ingresso, ma hanno perdite elettriche e un coefficiente di accoppiamento inferiore rispetto al PZT, la cui resistenza alla trazione può essere aumentata mediante precompressione. Furono provati anche altri materiali; le ferriti non metalliche erano promettenti per la loro bassa conduttività elettrica che si traduce in basse perdite di corrente parassita, Metglas offrivano un elevato coefficiente di accoppiamento, ma erano complessivamente inferiori al PZT. Negli anni '70 furono scoperti composti di terre rare e ferro con proprietà magnetomeccaniche superiori, vale a dire la lega Terfenol-D. Ciò aveva reso possibili nuovi progetti, ad esempio un trasduttore ibrido magnetostrittivo-piezoelettrico. Il più recente di questi materiali magnetostrittivi migliorati è Galfenol.
Altri tipi di trasduttori includono trasduttori a riluttanza variabile (o ad armatura mobile, o elettromagnetici), in cui la forza magnetica agisce sulle superfici degli spazi vuoti, e trasduttori a bobina mobile (o elettrodinamici), simili agli altoparlanti convenzionali; questi ultimi sono utilizzati nella calibrazione del suono subacqueo, a causa delle loro frequenze di risonanza molto basse e delle caratteristiche di banda larga piatta sopra di esse.
Sonar attivo
Il sonar attivo utilizza un trasmettitore sonoro (o proiettore) e un ricevitore. Quando i due sono nello stesso posto è il funzionamento monostatico. Quando il trasmettitore e il ricevitore sono separati si ha un funzionamento bistatico. Quando si utilizzano più trasmettitori (o più ricevitori), sempre spazialmente separati, si ha un funzionamento multistatico. La maggior parte dei sonar viene utilizzata in modo monostatico con lo stesso array spesso utilizzato per la trasmissione e la ricezione. I campi sonobuoy attivi possono essere gestiti in modo multistatico.
Il sonar attivo crea un impulso sonoro, spesso chiamato "ping", e quindi ascolta i riflessi ( eco ) dell'impulso. Questo impulso sonoro viene generalmente creato elettronicamente utilizzando un proiettore sonar costituito da un generatore di segnali, un amplificatore di potenza e un trasduttore/array elettroacustico. Un trasduttore è un dispositivo in grado di trasmettere e ricevere segnali acustici ("ping"). Un beamformer viene solitamente impiegato per concentrare la potenza acustica in un raggio, che può essere spostato per coprire gli angoli di ricerca richiesti. Generalmente i trasduttori elettroacustici sono del tipo Tonpilz e il loro design può essere ottimizzato per ottenere la massima efficienza sulla larghezza di banda più ampia, al fine di ottimizzare le prestazioni del sistema complessivo. Occasionalmente, l'impulso acustico può essere creato con altri mezzi, ad esempio chimicamente utilizzando esplosivi, fucili ad aria compressa o sorgenti sonore al plasma.
Per misurare la distanza da un oggetto, il tempo dalla trasmissione di un impulso alla ricezione viene misurato e convertito in un intervallo utilizzando la velocità nota del suono. Per misurare il rilevamento, vengono utilizzati diversi idrofoni e il set misura il tempo di arrivo relativo a ciascuno, o con una serie di idrofoni, misurando l'ampiezza relativa nei fasci formati attraverso un processo chiamato beamforming. L'uso di un array riduce la risposta spaziale in modo tale che per fornire un'ampia copertura vengono utilizzati sistemi multibeam . Il segnale target (se presente) insieme al rumore viene quindi passato attraverso varie forme di elaborazione del segnale, che per i sonar semplici può essere solo la misurazione dell'energia. Viene quindi presentato a una qualche forma di dispositivo decisionale che chiama l'uscita o il segnale o il rumore richiesti. Questo dispositivo decisionale può essere un operatore con cuffie o un display, o in sonar più sofisticati questa funzione può essere svolta da un software. Ulteriori processi possono essere eseguiti per classificare il bersaglio e localizzarlo, oltre a misurarne la velocità.
L'impulso può essere a frequenza costante o un cinguettio di frequenza variabile (per consentire la compressione dell'impulso alla ricezione). I sonar semplici generalmente utilizzano il primo con un filtro sufficientemente ampio da coprire eventuali variazioni Doppler dovute al movimento del bersaglio, mentre quelli più complessi generalmente includono la seconda tecnica. Da quando l'elaborazione digitale è diventata disponibile, la compressione degli impulsi è stata solitamente implementata utilizzando tecniche di correlazione digitale. I sonar militari hanno spesso più raggi per fornire una copertura a tutto tondo mentre quelli semplici coprono solo un arco stretto, sebbene il raggio possa essere ruotato, relativamente lentamente, mediante scansione meccanica.
In particolare quando vengono utilizzate trasmissioni a frequenza singola, l'effetto Doppler può essere utilizzato per misurare la velocità radiale di un bersaglio. La differenza di frequenza tra il segnale trasmesso e quello ricevuto viene misurata e convertita in una velocità. Poiché gli spostamenti Doppler possono essere introdotti dal movimento del ricevitore o del bersaglio, è necessario tener conto della velocità radiale della piattaforma di ricerca.
Un utile piccolo sonar è simile nell'aspetto a una torcia impermeabile. La testa viene puntata nell'acqua, viene premuto un pulsante e il dispositivo visualizza la distanza dal bersaglio. Un'altra variante è un " fishfinder " che mostra un piccolo display con banchi di pesci. Alcuni sonar civili (che non sono progettati per la furtività) si avvicinano ai sonar militari attivi in capacità, con visualizzazioni tridimensionali dell'area vicino alla barca.
Quando si utilizza il sonar attivo per misurare la distanza dal trasduttore al fondale, si parla di ecoscandaglio. Metodi simili possono essere usati guardando verso l'alto per la misurazione delle onde.
Il sonar attivo viene utilizzato anche per misurare la distanza attraverso l'acqua tra due trasduttori sonar o una combinazione di un idrofono (microfono acustico subacqueo) e proiettore (altoparlante acustico subacqueo). Quando un idrofono/trasduttore riceve uno specifico segnale di interrogazione risponde trasmettendo uno specifico segnale di risposta. Per misurare la distanza, un trasduttore/proiettore trasmette un segnale di interrogazione e misura il tempo che intercorre tra questa trasmissione e la ricezione della risposta dell'altro trasduttore/idrofono. La differenza di tempo, scalata dalla velocità del suono attraverso l'acqua e divisa per due, è la distanza tra le due piattaforme. Questa tecnica, se utilizzata con più trasduttori/idrofoni/proiettori, può calcolare le posizioni relative di oggetti statici e in movimento nell'acqua.
In situazioni di combattimento, un impulso attivo può essere rilevato da un nemico e rivelerà la posizione di un sottomarino al doppio della distanza massima alla quale il sottomarino stesso può rilevare un contatto e fornire indizi sull'identità del sottomarino in base alle caratteristiche del ping in uscita. Per questi motivi, il sonar attivo non viene utilizzato frequentemente dai sottomarini militari.
Un tipo di sonar molto direzionale, ma a bassa efficienza (utilizzato dalla pesca, dai militari e per la sicurezza portuale) fa uso di una complessa caratteristica non lineare dell'acqua nota come sonar non lineare, il trasduttore virtuale è noto come array parametrico.
Progetto Artemide
Il progetto Artemis era un progetto sperimentale di ricerca e sviluppo tra la fine degli anni '50 e la metà degli anni '60 per esaminare la propagazione acustica e l'elaborazione del segnale per un sistema sonar attivo a bassa frequenza che potrebbe essere utilizzato per la sorveglianza degli oceani. Un obiettivo secondario era l'esame dei problemi ingegneristici dei sistemi a fondo attivo fisso. L'array ricevente era situato sul pendio del Plantagnet Bank al largo delle Bermuda. L'array di sorgenti attive fu schierato dalla nave cisterna convertita della seconda guerra mondiale USNS Mission Capistrano. Gli elementi di Artemis furono usati sperimentalmente dopo che l'esperimento principale fu terminato.
Transponder
Si tratta di un dispositivo sonar attivo che riceve uno stimolo specifico e immediatamente (o con un ritardo) ritrasmette il segnale ricevuto o uno predeterminato. I transponder possono essere utilizzati per attivare o recuperare da remoto apparecchiature sottomarine.
Previsione delle prestazioni
Un bersaglio del sonar è piccolo rispetto alla sfera, centrata attorno all'emettitore, su cui si trova. Pertanto, la potenza del segnale riflesso è molto bassa, diversi ordini di grandezza inferiore al segnale originale. Anche se il segnale riflesso fosse della stessa potenza, il seguente esempio (utilizzando valori ipotetici) mostra il problema: supponiamo che un sistema sonar sia in grado di emettere un segnale di 10.000 W/m2 a 1 m e di rilevare un segnale di 0,001 W/m2 segnale. A 100 m il segnale sarà 1 W/m2 (a causa della legge dell'inverso del quadrato). Se l'intero segnale viene riflesso da un bersaglio di 10 m2, sarà di 0,001 W/m 2 quando raggiunge l'emettitore, cioè appena rilevabile. Tuttavia, il segnale originale rimarrà al di sopra di 0,001 W/m2 fino a 3000 m. Qualsiasi bersaglio di 10 m2 tra 100 e 3000 m che utilizza un sistema simile o migliore sarebbe in grado di rilevare l'impulso, ma non verrebbe rilevato dall'emettitore. I rilevatori devono essere molto sensibili per captare gli echi. Poiché il segnale originale è molto più potente, può essere rilevato molte volte oltre il doppio della portata del sonar (come nell'esempio).
Il sonar attivo ha due limiti di prestazioni: a causa del rumore e del riverbero. In generale, prevarrà l'uno o l'altro di questi, cosicché i due effetti possono essere inizialmente considerati separatamente.
In condizioni di rumore limitato al rilevamento iniziale:
- SL − 2PL + TS − (NL − AG) = DT,
dove SL è il livello della sorgente, PL è la perdita di propagazione (a volte indicata come perdita di trasmissione), TS è l' intensità del target, NL è il livello di rumore, AG è il guadagno dell'array ricevente (a volte approssimato dal suo indice di direttività) e DT è la soglia di rilevamento.
In condizioni di riverbero limitato al rilevamento iniziale (trascurando il guadagno dell'array):
- SL − 2PL + TS = RL + DT,
dove RL è il livello di riverbero e gli altri fattori sono come prima.
Sonar portatile per l'uso da parte di un subacqueo
Il LIMIS (impet mine imaging sonar) è un sonar per immagini portatile o montato su ROV per l'uso da parte di un subacqueo. Il suo nome è dovuto al fatto che è stato progettato per i incursori (uomini rana da combattimento o sommozzatori) per cercare mine di patella in acque a bassa visibilità.
Il LUIS (sistema di imaging subacqueo con lente) è un altro sonar per immagini utilizzato da un subacqueo.
C'è o c'era un piccolo sonar portatile a forma di torcia per i subacquei, che mostra semplicemente la portata.
Per l'INSS (sistema sonar di navigazione integrato).
Sonar rivolto verso l’alto
Un sonar rivolto verso l'alto (ULS) è un dispositivo sonar puntato verso l'alto guardando verso la superficie del mare. Viene utilizzato per scopi simili al sonar rivolto verso il basso, ma ha alcune applicazioni uniche come misurare lo spessore, la rugosità e la concentrazione del ghiaccio marino o misurare il trascinamento dell'aria dai pennacchi di bolle durante il mare mosso. Spesso è ormeggiato sul fondo dell'oceano o galleggia su una linea tesa ormeggiata a una profondità costante di forse 100 m. Possono anche essere utilizzati da sottomarini, AUV o il galleggiante Argo.
Sonar passivo
Il sonar passivo ascolta senza trasmettere. Viene spesso impiegato in ambienti militari, sebbene sia utilizzato anche in applicazioni scientifiche, ad esempio, rilevamento di pesci per studi di presenza/assenza in vari ambienti acquatici – vedere anche acustica passiva e radar passivo. Nell'uso più ampio, questo termine può comprendere virtualmente qualsiasi tecnica analitica che implichi un suono generato a distanza, sebbene di solito sia limitato alle tecniche applicate in un ambiente acquatico.
Identificare le sorgenti sonore
Il sonar passivo ha un'ampia varietà di tecniche per identificare la fonte di un suono rilevato. Ad esempio, le navi statunitensi di solito utilizzano sistemi di alimentazione a corrente alternata a 60 Hz. Se trasformatori o generatori sono montati senza un adeguato isolamento dalle vibrazioni dallo scafo o vengono allagati, il suono a 60 Hz dagli avvolgimenti può essere emesso dal sottomarino o dalla nave. Questo può aiutare a identificare la sua nazionalità, poiché tutti i sottomarini europei e quasi tutti i sottomarini di altre nazioni hanno sistemi di alimentazione a 50 Hz. Sorgenti sonore intermittenti (come una chiave inglese che cade), chiamate "transitori", possono anche essere rilevate dal sonar passivo. Fino a poco tempo fa, un operatore esperto e addestrato ha identificato i segnali, ma ora i computer possono farlo.
I sistemi sonar passivi possono avere grandi database sonori, ma l'operatore del sonar di solito classifica i segnali manualmente. Un sistema informatico utilizza frequentemente questi database per identificare classi di navi, azioni (ad esempio la velocità di una nave, o il tipo di arma rilasciata e le contromisure più efficaci da adottare), e persino navi particolari.
Limiti di rumore
Il sonar passivo sui veicoli è solitamente fortemente limitato a causa del rumore generato dal veicolo. Per questo motivo, molti sottomarini gestiscono reattori nucleari che possono essere raffreddati senza pompe, utilizzando la convezione silenziosa, o celle a combustibile o batterie, che possono anche funzionare silenziosamente. Anche le eliche dei veicoli sono progettate e lavorate con precisione per emettere un rumore minimo. Le eliche ad alta velocità spesso creano minuscole bolle nell'acqua e questa cavitazione ha un suono distinto.
Gli idrofoni sonar possono essere trainati dietro la nave o il sottomarino per ridurre l'effetto del rumore generato dall'imbarcazione stessa. Le unità trainate combattono anche il termoclino, in quanto l'unità può essere trainata sopra o sotto il termoclino.
Il display della maggior parte dei sonar passivi era un display a cascata bidimensionale. La direzione orizzontale del display sta rilevando. La verticale è la frequenza, o talvolta il tempo. Un'altra tecnica di visualizzazione consiste nel codificare a colori le informazioni frequenza-tempo per il rilevamento. I display più recenti sono generati dai computer e gli indicatori di posizione del piano di tipo radar imitano i display.
Previsione delle prestazioni
A differenza del sonar attivo, è coinvolta solo la propagazione unidirezionale. A causa della diversa elaborazione del segnale utilizzata, il rapporto segnale/rumore minimo rilevabile sarà diverso. L'equazione per determinare le prestazioni di un sonar passivo è:
- SL - PL = NL - AG + DT,
dove SL è il livello della sorgente, PL è la perdita di propagazione, NL è il livello di rumore, AG è il guadagno dell'array e DT è la soglia di rilevamento. La figura di merito di un sonar passivo è:
- FOM = SL + AG - (NL + DT).
Fattori di prestazione
Le prestazioni di rilevamento, classificazione e localizzazione di un sonar dipendono dall'ambiente e dall'apparecchiatura di ricezione, nonché dall'apparecchiatura di trasmissione in un sonar attivo o dal rumore irradiato dal bersaglio in un sonar passivo.
Propagazione del suono
Il funzionamento del sonar è influenzato dalle variazioni della velocità del suono, in particolare sul piano verticale. Il suono viaggia più lentamente in acqua dolce che in acqua di mare, anche se la differenza è piccola. La velocità è determinata dal modulo di massa dell'acqua e dalla densità di massa. Il modulo di massa è influenzato dalla temperatura, dalle impurità disciolte (di solito la salinità) e dalla pressione. L'effetto di densità è piccolo. La velocità del suono (in piedi al secondo) è approssimativamente:
- 4388 + (11,25 × temperatura (in °F)) + (0,0182 × profondità (in piedi)) + salinità (in parti per mille).
Questa equazione di approssimazione derivata empiricamente è ragionevolmente accurata per temperature normali, concentrazioni di salinità e l'intervallo della maggior parte delle profondità oceaniche. La temperatura dell'oceano varia con la profondità, ma tra i 30 ei 100 metri c'è spesso un cambiamento marcato, chiamato termoclino , che divide l'acqua superficiale più calda dalle acque fredde e calme che compongono il resto dell'oceano. Questo può frustrare il sonar, perché un suono che ha origine su un lato del termoclino tende ad essere deviato, o rifratto, attraverso il termoclino. Il termoclino può essere presente in acque costiere poco profonde. Tuttavia, l'azione delle onde spesso mescolerà la colonna d'acqua ed eliminerà il termoclino. Pressione dell’acqua influisce anche sulla propagazione del suono: una pressione più elevata aumenta la velocità del suono, che fa sì che le onde sonore si rifrangano lontano dall'area di maggiore velocità del suono. Il modello matematico della rifrazione si chiama legge di Snell.
Se la sorgente sonora è profonda e le condizioni sono giuste, la propagazione può avvenire nel 'canale sonoro profondo'. Ciò fornisce una perdita di propagazione estremamente bassa a un ricevitore nel canale. Ciò è dovuto all'intrappolamento del suono nel canale senza perdite ai confini. Una propagazione simile può avvenire nel "condotto superficiale" in condizioni adeguate. Tuttavia, in questo caso ci sono perdite per riflessione in superficie.
In acque poco profonde la propagazione avviene generalmente per riflessione ripetuta in superficie e sul fondo, dove possono verificarsi notevoli perdite.
La propagazione del suono è influenzata dall'assorbimento nell'acqua stessa così come in superficie e sul fondo. Questo assorbimento dipende dalla frequenza, con diversi meccanismi nell'acqua di mare. Il sonar a lungo raggio utilizza le basse frequenze per ridurre al minimo gli effetti di assorbimento.
Il mare contiene molte fonti di rumore che interferiscono con l'eco o la firma del bersaglio desiderato. Le principali fonti di rumore sono le onde e la navigazione. Il movimento del ricevitore attraverso l'acqua può anche causare rumore a bassa frequenza dipendente dalla velocità.
Dispersione
Quando si utilizza il sonar attivo, la dispersione si verifica da piccoli oggetti nel mare così come dal fondo e dalla superficie. Questa può essere una delle principali fonti di interferenza. Questa diffusione acustica è analoga alla diffusione della luce dei fari di un'auto in caso di nebbia: un raggio a matita ad alta intensità penetrerà in una certa misura nella nebbia, ma i fari a raggio più ampio emettono molta luce in direzioni indesiderate, gran parte della quale viene diffusa all'indietro all'osservatore, travolgente quella riflessa dal bersaglio ("white-out"). Per ragioni analoghe, il sonar attivo deve trasmettere in un raggio stretto per ridurre al minimo la dispersione.
La dispersione del sonar dagli oggetti (miniere, condutture, zooplancton, caratteristiche geologiche, pesci ecc.) è il modo in cui il sonar attivo li rileva, ma questa capacità può essere mascherata da una forte dispersione da falsi bersagli, o "disordine". Dove si verificano (sotto le onde che si infrangono; nelle scie delle navi; nel gas emesso da infiltrazioni e perdite del fondale marino ecc.), le bolle di gas sono potenti fonti di disordine e possono facilmente nascondere i bersagli. TWIPS (Twin Inverted Pulse Sonar) è attualmente l'unico sonar in grado di superare questo problema di disordine.
Questo è importante in quanto si sono verificati molti conflitti recenti nelle acque costiere e l'incapacità di rilevare se le mine sono presenti o meno presenta pericoli e ritardi per le navi militari, e anche per aiutare i convogli e le navi mercantili che cercano di sostenere la regione molto tempo dopo la fine del conflitto cessato.
Caratteristiche del bersaglio
Le caratteristiche di riflessione del suono del bersaglio di un sonar attivo, come un sottomarino, sono note come forza del bersaglio. Una complicazione è che gli echi si ottengono anche da altri oggetti nel mare come balene, scie, banchi di pesci e rocce.
Il sonar passivo rileva le caratteristiche del rumore irradiato dal bersaglio. Lo spettro irradiato comprende uno spettro continuo di rumore con picchi a determinate frequenze che possono essere utilizzate per la classificazione.
Contromisure
Contromisure attive (potenziate) possono essere lanciate da una nave sotto attacco per aumentare il livello di rumore, fornire un grande falso bersaglio e oscurare la firma della nave stessa.
Le contromisure passive (cioè non alimentate) includono:
- Montaggio di dispositivi che generano rumore su dispositivi di isolamento.
- Rivestimenti fonoassorbenti sugli scafi dei sommergibili, ad esempio tegole anecoiche.
Applicazioni militari
La moderna guerra navale fa ampio uso di sonar sia passivi che attivi da navi, aerei e installazioni fisse. Sebbene il sonar attivo fosse utilizzato dalle navi di superficie durante la seconda guerra mondiale, i sottomarini evitarono l'uso del sonar attivo a causa del potenziale per rivelare la loro presenza e posizione alle forze nemiche. Tuttavia, l'avvento della moderna elaborazione del segnale ha consentito l'uso del sonar passivo come mezzo principale per le operazioni di ricerca e rilevamento. Secondo quanto riferito, nel 1987 una divisione della società giapponese Toshiba vendette macchinari all'Unione Sovietica ciò ha permesso di fresare le pale delle loro eliche sottomarine in modo che diventassero radicalmente più silenziose, rendendo più difficile il rilevamento della nuova generazione di sottomarini.
L'uso del sonar attivo da parte di un sottomarino per determinare il rilevamento è estremamente raro e non fornirà necessariamente informazioni di rilevamento o portata di alta qualità alla squadra di controllo antincendio del sottomarino. Tuttavia, l'uso del sonar attivo sulle navi di superficie è molto comune e viene utilizzato dai sottomarini quando la situazione tattica impone che sia più importante determinare la posizione di un sottomarino ostile piuttosto che nascondere la propria posizione. Con le navi di superficie, si potrebbe presumere che la minaccia stia già seguendo la nave con i dati satellitari poiché qualsiasi nave attorno al sonar che emette rileverà l'emissione. Dopo aver ascoltato il segnale, è facile identificare l'apparecchiatura sonar utilizzata (di solito con la sua frequenza) e la sua posizione (con l'energia dell'onda sonora). Il sonar attivo è simile al radar in quanto, mentre consente il rilevamento di bersagli a una certa distanza,
Poiché il sonar attivo rivela la presenza e la posizione dell'operatore, e non consente l'esatta classificazione dei bersagli, viene utilizzato da piattaforme veloci (aerei, elicotteri) e rumorose (la maggior parte delle navi di superficie) ma raramente dai sottomarini. Quando il sonar attivo viene utilizzato da navi di superficie o sottomarini, in genere viene attivato molto brevemente a periodi intermittenti per ridurre al minimo il rischio di rilevamento. Di conseguenza, il sonar attivo è normalmente considerato un backup del sonar passivo. Negli aerei, il sonar attivo viene utilizzato sotto forma di boe usa e getta che vengono lanciate nell'area di pattugliamento dell'aereo o in prossimità di possibili contatti sonar nemici.
Il sonar passivo ha diversi vantaggi, il più importante è che è silenzioso. Se il livello di rumore irradiato dal bersaglio è sufficientemente alto, può avere una portata maggiore rispetto al sonar attivo e consente di identificare il bersaglio. Poiché qualsiasi oggetto motorizzato emette un certo rumore, in linea di principio può essere rilevato, a seconda del livello di rumore emesso e del livello di rumore ambientalenell'area, così come la tecnologia utilizzata. Per semplificare, il sonar passivo "vede" intorno alla nave che lo utilizza. Su un sottomarino, il sonar passivo montato sul muso rileva in direzioni di circa 270°, centrate sull'allineamento della nave, la matrice montata sullo scafo di circa 160° su ciascun lato e la matrice trainata di ben 360°. Le aree invisibili sono dovute all'interferenza della nave. Una volta che un segnale viene rilevato in una certa direzione (il che significa che qualcosa emette un suono in quella direzione, questo si chiama rilevamento a banda larga) è possibile ingrandire e analizzare il segnale ricevuto (analisi a banda stretta). Questo è generalmente fatto usando una trasformata di Fourier per mostrare le diverse frequenze che compongono il suono. Poiché ogni motore emette un suono specifico, è semplice identificare l'oggetto. I database di suoni unici del motore fanno parte di ciò che è noto come intelligenza acustica o ACINT.
Un altro uso del sonar passivo è determinare la traiettoria del bersaglio. Questo processo è chiamato analisi del movimento del bersaglio (TMA) e la "soluzione" risultante è la portata, la rotta e la velocità del bersaglio. Il TMA viene eseguito contrassegnando da quale direzione proviene il suono in momenti diversi e confrontando il movimento con quello della nave dell'operatore. I cambiamenti nel moto relativo vengono analizzati utilizzando tecniche geometriche standard insieme ad alcune ipotesi sui casi limite.
Il sonar passivo è furtivo e molto utile. Tuttavia, richiede componenti elettronici ad alta tecnologia ed è costoso. Viene generalmente distribuito su navi costose sotto forma di array per migliorare il rilevamento. Le navi di superficie lo usano con buoni risultati; è ancora meglio utilizzato dai sottomarini , ed è utilizzato anche da aeroplani ed elicotteri, soprattutto con un "effetto sorpresa", poiché i sottomarini possono nascondersi sotto strati termici. Se il comandante di un sottomarino crede di essere solo, può portare la sua barca più vicino alla superficie ed essere più facile da rilevare, oppure andare più in profondità e più velocemente, e quindi emettere più suoni.
Di seguito sono riportati esempi di applicazioni sonar in uso militare. Molti degli usi civili indicati nella sezione seguente possono essere applicabili anche all'uso navale.
Guerra ASW
Fino a poco tempo fa, i sonar per navi erano solitamente realizzati con array montati sullo scafo, a centro barca oa prua. Si scoprì subito dopo il loro utilizzo iniziale che era necessario un mezzo per ridurre il rumore del flusso. I primi erano realizzati in tela su telaio, poi sono stati utilizzati quelli in acciaio. Ora le cupole sono generalmente realizzate in plastica rinforzata o gomma pressurizzata. Tali sonar sono principalmente attivi nel funzionamento. Un esempio di sonar convenzionale montato sullo scafo è l'SQS-56.
A causa dei problemi di rumore delle navi, vengono utilizzati anche sonar trainati. Questi hanno il vantaggio di poter essere posizionati più in profondità nell'acqua, ma hanno limitazioni sul loro utilizzo in acque poco profonde. Questi sono chiamati array trainati (lineari) o sonar a profondità variabile (VDS) con array 2/3D. Un problema è che gli argani necessari per dispiegarli/recuperarli sono grandi e costosi. I set VDS sono principalmente attivi durante il funzionamento, mentre gli array trainati sono passivi.
Un esempio di un moderno sonar trainato da nave attivo-passivo è Sonar 2087 realizzato da Thales Underwater Systems .
Siluri
I siluri moderni sono generalmente dotati di un sonar attivo/passivo. Questo può essere utilizzato per puntare direttamente sul bersaglio, ma vengono utilizzati anche siluri a ricerca di scia . Un primo esempio di homer acustico è stato il siluro Mark 37.
Le contromisure ai siluri possono essere rimorchiate o libere. Un primo esempio è stato il dispositivo tedesco Sieglinde mentre il Bold era un dispositivo chimico. Un dispositivo statunitense ampiamente utilizzato era l'AN / SLQ-25 Nixie trainato mentre il simulatore di sottomarino mobile (MOSS) era un dispositivo gratuito. Una moderna alternativa al sistema Nixie è il sistema di difesa dai siluri per navi di superficie S2170 della Royal Navy britannica.
Mine
Le mine possono essere dotate di un sonar per rilevare, localizzare e riconoscere il bersaglio richiesto. Un esempio è la mina immersa statunitense CAPTOR.
Le contromisure
Il sonar per contromisure mine (MCM), a volte chiamato "sonar per evitare mine e ostacoli (MOAS)", è un tipo specializzato di sonar utilizzato per rilevare piccoli oggetti. La maggior parte dei sonar MCM sono montati sullo scafo, ma alcuni tipi sono di progettazione VDS. Un esempio di sonar MCM montato sullo scafo è il Tipo 2193 mentre il sonar per la caccia alle mine SQQ-32 e i sistemi Tipo 2093 sono progetti VDS.
Navigazione sottomarina
I sottomarini fanno affidamento sul sonar in misura maggiore rispetto alle navi di superficie poiché non possono utilizzare il radar in acqua. Gli array sonar possono essere montati sullo scafo o rimorchiati. Le informazioni montate sugli attacchi tipici sono fornite nel sottomarino di classe Oyashio e nei sottomarini classe Swiftsure.
Aerei
Gli elicotteri possono essere utilizzati per la guerra antisommergibile dispiegando campi di boe attive-passive o possono azionare sonar ad immersione, come l' AQS-13. I velivoli ad ala fissa possono anche schierare boe sonore e avere una maggiore resistenza e capacità di dispiegarle. L'elaborazione dalle boe sonore o dal sonar ad immersione può avvenire sull'aereo o sulla nave. Il sonar ad immersione ha il vantaggio di essere dispiegabile a profondità adeguate alle condizioni quotidiane. Gli elicotteri sono stati utilizzati anche per missioni di contromisura mine utilizzando sonar trainati come l' AQS-20A.
Comunicazioni subacquee
Sonar dedicati possono essere montati su navi e sottomarini per la comunicazione subacquea.
Sorveglianza oceanica
Gli Stati Uniti hanno avviato un sistema di sistemi di sorveglianza oceanica fissi e passivi nel 1950 con il nome classificato Sound Surveillance System (SOSUS) con American Telephone and Telegraph Company (AT&T), con la sua ricerca Bell Laboratories e le entità di produzione Western Electric che sono state appaltate per lo sviluppo e installazione. I sistemi sfruttavano il canale SOFAR , noto anche come canale del suono profondo, dove una velocità minima del suono crea una guida d'onda in cui il suono a bassa frequenza percorre migliaia di chilometri. L'analisi era basata su uno spettrografo sonoro AT&T, che convertiva il suono in uno spettrogramma visivo che rappresentava un'analisi tempo-frequenzadi suono che è stato sviluppato per l'analisi del parlato e modificato per analizzare i suoni subacquei a bassa frequenza. Quel processo era l'analisi e la registrazione a bassa frequenza e l'apparecchiatura era denominata analizzatore e registratore a bassa frequenza, entrambi con l'acronimo LOFAR. La ricerca LOFAR è stata chiamata Jezebel e ha portato all'utilizzo in sistemi aerei e di superficie, in particolare boe sonore che utilizzano il processo e talvolta utilizzano "Jezebel" nel loro nome. Il sistema proposto offriva una tale promessa di rilevamento di sottomarini a lungo raggio che la Marina ordinò mosse immediate per l'implementazione.
Tra l'installazione di un array di prova seguita da un array operativo prototipo a grandezza naturale, quaranta elementi nel 1951 e nel 1958, i sistemi furono installati nell'Atlantico e poi nel Pacifico con il nome non classificato Project Caesar. I sistemi originali sono stati terminati in stazioni costiere classificate designate Naval Facility (NAVFAC) spiegate come impegnate in "ricerche oceaniche" per coprire la loro missione classificata. Il sistema è stato aggiornato più volte con un cavo più avanzato che consente l'installazione degli array nei bacini oceanici e l'elaborazione aggiornata. Le stazioni di terra sono state eliminate in un processo di consolidamento e reindirizzamento degli array ai centri di elaborazione centrali negli anni '90. Nel 1985, con l'entrata in funzione di nuovi array mobili e altri sistemi, il nome del sistema collettivo è stato cambiato in Integrated Undersea Surveillance System (IUSS). Nel 1991 la missione del sistema è stata declassificata. L'anno prima le insegne IUSS erano autorizzate all'uso. È stato concesso l'accesso ad alcuni sistemi per la ricerca scientifica.
Si ritiene che un sistema simile sia stato gestito dall'Unione Sovietica.
Sicurezza subacquea
Il sonar può essere utilizzato per rilevare uomini rana e altri subacquei . Questo può essere applicabile intorno alle navi o agli ingressi dei porti. Il sonar attivo può anche essere utilizzato come deterrente e/o meccanismo di disattivazione. Uno di questi dispositivi è il sistema Cerberus.
Sonar portatile
Il sonar per immagini di mine di patella (LIMIS) è un sonar per immagini portatile o montato su ROV progettato per i sommozzatori di pattuglia (uomini rana da combattimento o sommozzatori) per cercare mine di patella in acque a bassa visibilità.
Il LUIS è un altro sonar per immagini utilizzato da un subacqueo.
Il sistema sonar di navigazione integrato (INSS) è un piccolo sonar portatile a forma di torcia per subacquei che visualizza la portata.
Sonar di intercettazione
Questo è un sonar progettato per rilevare e localizzare le trasmissioni da sonar attivi ostili. Un esempio di ciò è il Tipo 2082 montato sui sottomarini britannici classe Vanguard.
….Gli attuali eventi storici ci devono insegnare che, se vuoi vivere in pace,
devi essere sempre pronto a difendere la tua Libertà….
La difesa è per noi rilevante
poiché essa è la precondizione per la libertà e il benessere sociale.
Dopo alcuni decenni di “pace”,
alcuni si sono abituati a dare la pace per scontata:
una sorta di dono divino
e non, un bene pagato a carissimo prezzo dopo innumerevoli devastanti conflitti.…
(Fonti: https://svppbellum.blogspot.com/, Web, Google, PopularMechanics, Wikipedia, You Tube)
























.jpeg)




























_pa%CC%8A_et_af_s%C3%B8v%C3%A6rnets_skibe_af_Thetis-klassen.jpeg)









.jpeg)

.jpeg)

.jpeg)
%20WW2.jpeg)

.jpg)


