

SOSUS, acronimo di Sound Surveillance System, è una catena di postazioni subacquee di ascolto distribuite nell'oceano Atlantico settentrionale, vicino alla Groenlandia, all'Islanda e al Regno Unito (un'area denominata GIUK gap).
Il sistema era in origine gestito dalla United States Navy allo scopo di monitorare gli spostamenti dei sottomarini della marina militare sovietica che, per poter attaccare obiettivi ad ovest, avrebbero dovuto necessariamente attraversare quella zona. Altre stazioni appartenenti a SOSUS erano dislocate nell'Oceano Pacifico. Il sistema fu successivamente implementato con dispositivi mobili come il Surveillance Towed Array Sensor System (SURTASS), per poi diventare parte integrante dell'Integrated Undersea Surveillance System (IUSS). Molte postazioni di ascolto sono tuttora in funzione.
Storia
Lo sviluppo del SOSUS iniziò nel 1949, quando la marina statunitense istituì una commissione (Committee for Undersea Warfare) con lo scopo di fare ricerca per la lotta antisommergibile. La commissione finanziò con 10 milioni di dollari all'anno lo sviluppo di sistemi per contrastare la flotta sottomarina sovietica, costituita principalmente da sottomarini con propulsione a gasolio. L'attenzione della commissione si concentrò sullo sviluppo di un sistema che monitorasse i suoni a bassa frequenza nel canale SOFAR mediante l'uso di molteplici postazioni di ascolto equipaggiate con idrofoni e mezzi per triangolare le posizioni dei sottomarini anche a centinaia di miglia di distanza.
Fase di ricerca
Nel 1950 al MIT, la commissione sponsorizzò il Progetto Hartwell, così chiamato in onore del ristorante "Hartwell Farms" di Lexington, dove furono mossi i primi passi verso la progettazione. Nel novembre dello stesso anno, affidarono alla Western Electric la costruzione di un sistema dimostrativo, e i primi sei idrofoni furono installati sull'isola di Eleuthera, nelle Bahamas. Nel frattempo il Progetto Jezebel dei Bell Labs e il Progetto Michael della Columbia University concentravano gli studi sull'acustica a lungo raggio nell'oceano.
Al 1952 erano stati fatti sufficienti passi in avanti nello sviluppo dei piani segreti, perciò furono installati sei apparati nel nord Atlantico. Il sistema prese il nome di SOSUS. Il numero di apparati crebbe a nove verso la fine dello stesso anno; la Royal Navy, insieme ad alcune navi della marina statunitense, incluse la USS Neptune e la USS Peregrine, iniziarono la posa del cablaggio con il Progetto Caesar. Nel 1953, le ricerche del Progetto Jezebel portarono allo sviluppo di un sistema ad alte frequenze per il tracciamento diretto delle navi passanti sopra le stazioni di ascolto, da posizionarsi sopra gli stretti. Tale progetto fu denominato Progetto Colossus.
Il sistema SOSUS diviene operativo
Nel 1961, SOSUS tracciò la rotta dell’SSBN USSGeorge Washington (SSBN-598) diretto dagli Stati Uniti verso il Regno Unito. L'anno successivo il SOSUS per la prima volta rilevò e tracciò la rotta di un sottomarino diesel sovietico. Più tardi nello stesso anno, il sistema dimostrativo SOSUS delle Bahamas riuscì a tracciare un sottomarino sovietico della classe Foxtrot in piena crisi dei missili di Cuba. Il SOSUS ricevette continui aggiornamenti per far fronte alla sempre maggiore "silenziosità" dei sottomarini.
I sistemi SOSUS sono costituiti da apparati idrofonici sottomarini connessi ad impianti a terra tramite cablaggi. I singoli apparati furono dapprima installati su pendenze continentali o su montagne sottomarine, in luoghi in cui fosse ottimale la propagazione a lungo raggio di onde acustiche. La scelta ottimale delle locazioni sottomarine, unitamente alla sensibilità degli apparecchi, permettevano al sistema di rilevare potenze acustiche inferiori al watt a distanze di molte centinaia di chilometri.
Le stazioni di monitoraggio del SOSUS erano conosciute come Naval Facilities (NAVFAC, da non confondersi con l’unità Naval Facilities Engineering Command della marina statunitense, che ha lo stesso acronimo).
Il LOFAR (ovvero l'analisi delle frequenze) fu portata avanti a partire dai segnali che gli apparati inviavano alla stazione di terra, che venivano poi decodificati. Una stampante provvedeva a emettere degli output cartacei chiamati lofargrams, utilizzati per rilevare e classificare i contatti. Una stilo elettronica imprimeva su di un rotolo di carta le forme d'onda dei suoni captati dall'oceano. Il personale navale incaricato di monitorare l'attività sottomarina tramite i lofargram era chiamato "OT" (Ocean System Technicians).
La forma d'onda, a certe frequenze, poteva rivelare la possibilità della presenza di un sottomarino o di un velivolo: in tal caso venivano condotte ulteriori analisi per determinarne la posizione geografica. Oltre agli "OT" era sempre presente un capitano, di solito di grado inferiore, e due radiotelegrafisti per gestire le comunicazioni.
Quando il sottomarino nucleare statunitense USS Thresher affondò nel 1963, il SOSUS aiutò a determinarne la posizione. Nel 1968, furono effettuati per la prima volta i rilevamenti dei sottomarini sovietici di classe Victor e Charlie, mentre nel 1974 fu tracciato un Delta.
Nel 1985, furono effettuati dei test del nuovo sistema "FDS" (Fixed Distributed System), che fu integrato nel SOSUS. Il nome dell'intero sistema divenne Integrated Undersea Surveillance System (IUSS). Nel 1991, la missione del sistema fu desecretata; l'anno successivo il SOSUS iniziò a tracciare gli spostamenti delle balene e le stazioni dei lofargram furono sostituite da più moderne stazioni operative.
Il SOSUS dopo la guerra fredda
Le stazioni di monitoraggio del SOSUS furono gradualmente ridotte di numero tra gli anni 1970 e 1980. Con la fine della guerra fredda negli anni novanta l'effettiva utilità del sistema calò, motivo per cui il SOSUS e lo IUSS furono declassificati nel 1991. Nonostante ciò, l'esistenza del SOSUS e dello IUSS era comunque sempre stata risaputa.
Gli apparati del SOSUS sono attualmente utilizzati per fini scientifici, come il tracciamento delle vocalizzazioni delle balene e di altri mammiferi oceanici per vari progetti di studio.
LA MINA STATUNITENSE “Captor Mk 60”
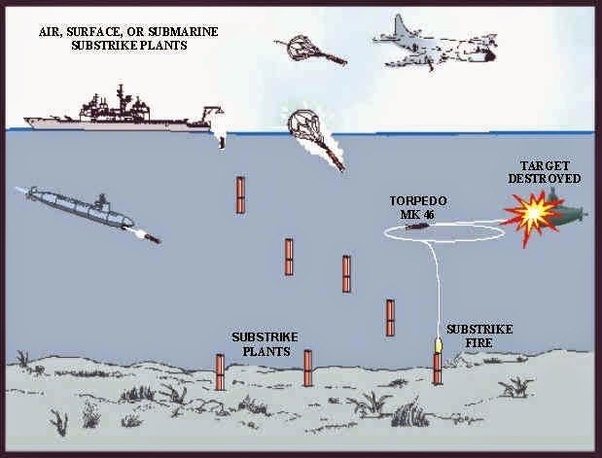
Il CAPTOR (Encapsulated Torpedo) Mark 60 è l'unica mina navale antisommergibile degli Stati Uniti in acque profonde. Utilizza un siluro Mark 46 contenuto in un guscio di alluminio ancorato al fondo dell'oceano. La mina può essere posizionata sia da aerei, sottomarini o navi di superficie. Il siluro, una volta piazzato, può durare da settimane a mesi sott'acqua. Il contratto di produzione originale della mina CAPTOR fu assegnato alla Goodyear Aerospace nel 1972, ed entrò in servizio nel 1979. Si sperava di ridurre i costi del campo minato e fu utilizzato per la creazione di una barriera della "lacuna Greenland-Islanda-Regno Unito per interrompere la rotta ai sottomarini sovietici nel caso in cui la deterrenza fallisse".
La mina utilizzava la propagazione sonora Reliable Acoustic Path (RAP) per identificare e tracciare passivamente la differenza tra le firme dei sottomarini ostili, le navi di superficie e i sottomarini amici. Una volta identificato, il siluro lascia il suo involucro per distruggere il suo bersaglio.
L'MK-60 CAPTOR, una delle principali armi antisommergibili della Marina statunitense; è in realtà un lanciasiluri ormeggiato in acque profonde. La mina Mk 60 è una sofisticata mina anti-sottomarino da guerra (ASW) ormeggiata, progettata per rilevare e classificare i sottomarini e rilasciare un siluro Mk 46 modificato per acquisire e attaccare solo gli obiettivi sommersi. Questa mina d'acqua profonda è progettata per essere posata da aerei o sottomarini, ed è ancorata al fondo dell'oceano. La mina utilizza un dispositivo di fuoco d'influenza ed è in grado di classificare i sottomarini di passaggio. Il suo sistema di rilevamento acustico è progettato per cercare sottomarini ostili, ignorando le imbarcazioni di superficie e le amichevoli firme acustiche dei sottomarini. L'arma rimane inattiva fino a quando non viene rilevato un bersaglio, a quel punto il siluro esce dalla sua capsula per attaccare e distruggere il suo bersaglio. Come in altre mine, l'Mk 60 incorpora un ritardo nell'armamento. L'MK-60 può essere dispiegata per via aerea, sottomarina o nave di superficie.
Quest'arma è stata sviluppata dalla Divisione Mine del Naval Ordnance Laboratory, che ora si trova presso il Naval Surface Warfare Center Dahlgren Division, Coastal Systems Station, Panama City, Florida. Poiché può essere convertita per avere una certa capacità operativa in acque litoranee, una modifica al CAPTOR è stata considerata come una delle opzioni per il programma Littoral Sea Mine (LSM).
Questa mina per acque profonde ASW fu concepita intorno al 1960 e sviluppata alla NSWC di White Oak. Nel novembre 1962 fu emesso un OR specifico provvisorio; il nome Captor è stato selezionato per un OR specifico emesso nel maggio 1964. A quel tempo si sperava che la Captor avrebbe ridotto i costi di barriera delle mine di un fattore 100 (e i numeri di barriera di un fattore 400). Il primo contratto di produzione (per Techeval/Opeval) fu assegnato a Goodyear Aero-space (ora divisione di Loral) nel 1972. La valutazione tecnica iniziò nel febbraio 1974 e la valutazione operativa a giugno. La capacità operativa iniziale fu raggiunta nel settembre 1979 e l'approvazione per l'uso in servizio fu concessa nel febbraio 1980. Questo sviluppo molto prolungato testimonia la complessità del sistema. Infatti, problemi di affidabilità portarono alla sospensione della produzione nel 1980, con la ripresa dell'approvvigionamento nell'anno fiscale 82.
La mina Captor è un siluro Mk 46 Mod 4 incapsulato in un corpo di ormeggio/sensore che rileva e segue passivamente i sottomarini che passano sopra la testa. Quando una presunta traccia è sufficientemente attraente, Captor inizia il rilevamento attivo e poi lancia il siluro verso l'alto. Questa modalità di funzionamento funzionerà a qualsiasi profondità, perché utilizza una propagazione del suono affidabile del percorso acustico (RAP). La determinazione del rilevamento iniziale del bersaglio avviene tramite la correlazione acustica passiva e l'elaborazione digitale a bassa potenza, utilizzando tecniche originariamente sviluppate per il progetto sonar sottomarino PUFFS (BQG-2/4). Il corpo della mina può essere lanciato dall’aria, in superficie o a mezzo sottomarino (tubo lanciasiluri), e può ormeggiare in acqua ad almeno 1000 piedi di profondità. La vita è di diverse settimane o mesi. Le dimensioni (pesi) per le versioni lanciate dall’aria o in superficie sono 21 x 145 in (2370 lb); per la versione lanciata da sottomarino, 21 x 132 in (2056 lb).
Durante il techeval del 1974-febbraio 1975, il suo sistema di rilevamento e classificazione soffriva di eccessivi falsi allarmi e il sistema era ancora inaffidabile. Tuttavia, la mina Captor aveva già mostrato un potenziale sufficiente a giustificare un ulteriore lavoro, e furono suggeriti test e valutazioni successive delle unità di produzione iniziali. L'approvazione provvisoria per l'uso in servizio (ASU) fu concessa nel gennaio 1976; a quel punto il tasso di produzione era limitato a 10 esemplari al mese. I test e le valutazioni successive, con l'impiego di 10 armi, iniziarono nel gennaio 1978. La produzione su larga scala (15 mesi) fu approvata nel marzo 1979. All'epoca l'obiettivo finale era di 5785 mine complessive.
Anche a quel tempo il progetto Captor prevedeva un tentativo di controllo a distanza (RECO) tramite segnale acustico. Questo lavoro procedeva ancora una decina di anni dopo; il programma FY88 comprendeva studi iniziali sul rumore ambientale e sul rumore di fondo. RECO ora si applica a Captor, Quickstrike e mine avanzate di tipo non specificato. Il progetto fu gestito da NSWC White Oak; i contattori sono APL e Penn State University.
Il Captor è ora in fase di modifica per accettare un siluro Mk 46 Mod 5 (NEARTIP) come testata. Il progetto hardware per questa versione Mod 1 è stato completato sotto il programma FY88.
L’Mk 66 è la versione operativa della mina Captor
L'approvvigionamento iniziò nell'FY78, il budget dell'FY78-80 comprendeva 1810 Mk 60s. Nessuna fu acquistata nell'FY81, ma l'FY82 comprendeva la richiesta di altre 400 Captor. Acquisti successivi: FY83, 300; FY84, 300; FY85, 300; FY86, 150 (non richiesti). A partire dal 1985, i piani prevedevano 475 nell'85, 600 nell'86, 493 nell'87 e nessuno nell'88. Il costo unitario nell'anno fiscale 86, l'ultimo anno di approvvigionamento, fu di circa 377.000 dollari. In confronto, il costo unitario di una singola Captor era di 113.000 dollari nell'anno fiscale 78.
ENGLISH
Sound Surveillance System (SOSUS)
The SOund SUrveillance System (SOSUS) provides deep-water long-range detection capability. SOSUS enjoyed tremendous success during the Cold War tracking submarines by their faint acoustic signals. SOSUS consists of high-gain long fixed arrays in the deep ocean basins
BEAM accesses form beams from multiple hydrophone arrays trained on the seafloor to provide signal gain obtained through beam forming.
PHONE accesses individual hydrophones from arrays throughout the oceans provides omni-directional coverage.
With the advent of submarine warfare and it's impact on Allied forces and supply lines in WWII, the need for timely detection of undersea threats was made a high priority in Anti-Submarine Warfare (ASW). As technology of the time progressed, it was recognized that shore-based monitoring stations were the answer to the problem since they could be made basically impervious to destruction, foul weather, and ambient self-generated noise. Since the early 1950s the Atlantic and Pacific oceans have been under the vigilence of SOSUS, with long acoustic sensors (hydrophones) installed across the ocean bottom at key locations. SOSUS has transitioned from single-beam paper displays to computer-based workstations for acoustic data analysis. By the end of FY 1998, the Shore Signal Information Processing Segment (SSIPS) and Surveillance Direction System (SDS) had been installed at all shore facilities, giving SOSUS a common equipment configuration and significantly reducing system infrastructure support costs.
With the development of quieter submarines and counter-tactics to evade SOSUS, newer technologies have been implemented over the years to "keep up with the threat". Faster processors, higher capacity storage devices, and "cleaner code" has enabled the advancement of the art of locating undersea threats. Currently, the Integrated Undersea Surveillance System (IUSS) uses all of these advancements in the Fixed Surveillance System (FSS), Fixed Distributed System (FDS), and the Advanced Deployable System (ADS).
SOSUS Arrays are being placed in a standby status in which the data is available but not continuously monitored. In the event of a resurgence in the global submarine threat the worldwide network of fixed undersea surveillance systems such as the Sound Surveillance System (SOSUS) a critical asset. Since the end of the Cold War, Reservists have been increasing their role in this mission area. In a recent report, entitled The Future Naval Reserve: Roles & Missions, Size & Shape, the Assistant Secretary of Defense for Reserve Affairs stated that "expanding Reserve Component participation in this area would help protect the capital investment and maintain the infrastructure in peacetime for a potential resurgent undersea threat." This report also notes that, in the absence of a global threat, Reservists are helping to meet today's more limited surveillance needs while training for the future.
The deployment and maintenance of the undersea components of the IUSS shore systems is accomplished by technicians and engineers operating from IUSS Cable Support Ships.
Under operational command of the U.S. Navy's Commander Undersea Surveillance (CUS) IUSS shore systems are staffed and operated by uniformed U.S. Navy personnel. System life cycle and engineering support is provided by carreer civil servants (NISE East Code 341) and contractor personnel located at the IUSS Operations Support Center (IOSC).
The 50s and 60s witnessed the birth, early childhood, development, and growth of undersea surveillance, originally called the Sound Surveillance System (SOSUS). With the 70s came technology upgrades both in shore and underwater systems. This decade also saw planning for new cableships, super NAVFACs, and the Surveillance Towed Array Sensor (SURTASS) system. The 80s witnessed consolidation of shore assets, enabled by technological advances in underwater systems, arrival of the first SURTASS ships, delivery of the cableship USNS ZEUS, and the end of the Cold War. Thus far, the 90s have seen beginnings such as in the Advanced Deployable System (ADS) and endings in the last of the NAVFACs, Keflavik, ceasing operations. The following reflect upon some of the highlights of the past five decades...
1960's | 1970's | 1980's | 1990's | End
1949 - As a result of experience during recent hostilities, the Navy announced its intention to exploit passive sonar for Anti-Submarine Warfare (ASW) purposes.
1950 - Due to renewed interest in underwater acoustic research, the Navy established Project Hartwell under MIT leadership. It was named in honor of Dr. G.P. Hartwell, Deputy Chairman of the Committee for Undersea Warfare and professor at the University of Pennsylvania. The project was initiated to structure a long range defense against submarines. Concluding that detection of low frequency sound was the answer to the snorkeling diesel submarine problem, the committee recommended $10 million of R&D funding annually to be applied toward development of an effective, long range, acoustic detection sensor system using bottomed hydrophone arrays.
1950, 29 Oct - Western Electric Company (WECO) and the Office of Naval Research (ONR) representatives met to draft WECO's proposal. Less than one month later, on 13 November, a letter contract was issued.
1951 - A six-element test array was installed at Eleuthera. Ensign Joe Kelly was assigned as BUSHIPS Code 849 to oversee two high priority projects - Project Jezebel, a Bell Telephone Labs (BTL) effort, and Project Michael, a parallel Columbia University effort. Both projects focused on exploiting long range acoustics in the ocean.
1952 - In a top secret letter, CNO directed BUSHIPS to procure six sets of Low Frequency Ranging (LOFAR) components for deployment for deployment in the North Atlantic basin. The classified name SOSUS was established, and the unclassified name Caesar was established to cover installation and production. The number of planned stations increased to nine later that year. HMS ALERT installed an initial 40-element operational array off Eleuthera in early January for a 50 day total charter cost of $56K. Cableships USNS NEPTUNE and MYER were assigned to Project Caesar. These humble beginnings of the "Caesar Fleet" were subsequently augmented (over the next several decades) with USNS THOR, AEOLUS, MIZAR, HUDDELL, ZEUS, and a cameo appearance by USNS WATERS.
1953 - Part of Project Jezebel was a design study of a short range, high frequency, upward-looking set of bottomed active sources to be located in a key strait as a complement to SOSUS; this was known as Project Colossus.
1954 - Ten additional Caesar stations were authorized, including three for the Atlantic and six for the Pacific, with one in Hawaii. The first naval facility, NAVFAC Ramey, was commissioned in September followed by Grand Turk in October and San Salvador in December.
1955 - NAVFACs were established in Bermuda, Shelburne, Nantucket, and Cape May.
1956 - NAVFACs Cape Hatteras and Antigua were established. Evaluation Centers became operational in New York and Norfolk.
1957 - NAVFACs Eleuthera, Barbados and San Nicholas Island, in the Pacific, were established.
1958 - Commander, Oceanographic System, Atlantic was established. Oceanographic units in New York, San Juan and Norfolk were disestablished. NAVFACs Point Sur, Centerville Beach, Pacific Beach, Coos Head were established along the Pacific West Coast.
1958 to 1960 - The Atlantic and Pacific Missile Impact Location Systems (MILS) were installed in support of national priorities other than ASW.
1959 - NAVFAC Argentia was established.
1950's | 1970's | 1980's | 1990's | End
1960 - The King Shallow Water System was installed and terminated at NAVFAC Argentia. It included ten 8-element arrays on two 40-pair cables intended to counter Soviet Union Hudson Bay submarine patrols.
1961 - SOSUS tracks the USS George Washington from CONUS to the UK.
1962 - NAVFAC Adak was established. NAVFAC Lewes was established after NAVFAC Cape May was destroyed by the notorious "Ash Wednesday / Good Friday" storm. The first major shore processing system upgrade, the Digital Spectrum Analysis (DSA) was installed at NAVFAC Lewes. It featured 9 inch grams in place of the previous 4 inch grams. Roman numeral time marks, however, remained.
1962, 26 Jun - NAVFAC Cape Hatteras made the first SOSUS detection of a Soviet diesel submarine.
1962, 6 Jul - NAVFAC Barbados made the first detection of a Soviet nuclear submarine as it crossed over the gap between Greenland, Iceland and the United Kingdom (known as the GIUK Gap).
1962, 26 Oct - The first positive correlation and sighting was made, at NAVFAC Grand Turks, of a SOSUS contact. A VP aircraft contact was made on a Soviet Foxtrot class submarine, designated Charlie 20, during the Cuban Missile Crisis.
1963 - The first 2x20 array was installed at NAVFAC Argentia. In April, the USS THRESHER sank, and SOSUS played a critical role in pinpointing the location of the incident.
1964 - Commander, Oceanographic System, Pacific was established. OP-95, Director, ASW programs was established under VADM Charles B. Martell. Project Caesar was transferred from BUSHIPS to Industrial Manager, Potomac River Command and then to the Naval District, Washington the following year.
1966 - NAVFAC Keflavik was established exactly one year after the decision was made to deploy SOSUS in northern waters. Project Caesar was transferred to Naval Electronics Systems Command, Code EPO-3, located at main Navy (now the site of the Vietnam Memorial). The first 3x16 array system was terminated at Keflavik.
1968 - In May, the USS SCORPION submarine sank southwest of the Azores. In this same year, a Soviet Golf class SSB sank north of Hawaii. SOSUS played a key role in locating the sites of both disasters. The first detection of Victor and Charlie class Soviet submarines were detected by NAVFAC Keflavik.
1950's | 1960's | 1980's | 1990's | End
1970 - The first women were assigned to operational billets at NAVFAC Eleuthera. The Oceanographic Technician (OT) rate was established. NAVFAC San Salvador became the first NAVFAC to be decommissioned.
1972 - PME 124 was established and the modernization of SOSUS began.
1973 - CAPT Joe Kelly, known as the "father of SOSUS", retired.>
1974 - NAVFAC Brawdy was established as the first "Super NAVFAC." NAVFAC Keflavik made the first detection on a Soviet Delta class submarine.
Mid 1970's - CAPT Dempster Jackson became PME 124... and the rest is history.
1977 - The first woman commanding officer of a NAVFAC, LCDR Peggy Frederick, took command of NAVFAC Lewes. CAPT Harry Cox relieved RADM Dempster Jackson as PME 124.
1950's | 1960's | 1970's | 1990's | End
1980 - Naval Oceanographic Processing Facility (NOPF) Dam Neck was established.
The Western Atlantic (WESTLANT) array consolidation was completed.
1981 - NOPF Ford Island was established.
1984 - USNS STALWART, the first SURTASS ship, arrived at Little Creek. It was later followed by PREVAIL, INVINCIBLE, BOLD, ABLE, AUDACIOUS, TENACIOUS, VICTORIOUS and EFFECTIVE. Delivery was made on the first Navy cableship to be built from the hull up; this was the USNS ZEUS. The IUSS Operational Support Center (IOSC) was established.
1985 - Readiness Training Facility (RTF) was established at Dam Neck. The new system name of Integrated Undersea Surveillance System was established. The Fixed Distributed
System test array, a low frequency, passive acoustic surveillance system for detection of quiet submarines using hydrophones densely distributed on the sea floor, was terminated at NAVFAC Brawdy.
1986 - NAVELEX, PME 124, became SPAWAR, the Space and Naval Warfare Systems Command, PMW 180.
1987 - NAVFAC Whidbey Island was established.
1988 - CAPT Joe Kelly (Ret.) passed away at Bethesda Naval Hospital in Maryland.
1989 - The "Iron Curtain: fell with repercussions worldwide, including the breakup of the Soviet Union, the easing of tensions between the "Super Powers" of the world, and the eventual downsizing of U.S. Military forces, including IUSS. PMW 180 was renamed Program Directorate 80 (PD 80).
1950's | 1960's | 1970's | 1980's | End
1990 - Authorization was given for IUSS officers to wear the IUSS insignia on their uniforms.
1991 - The SOSUS IUSS system mission was declassified.
1992 - NAVFAC Centerville Beach survived 3 earthquakes registering 6.9, 7.0, and 7.1 on the Richter scale. The USNS VICTORIOUS became the first swath hull SURTASS ship accepted by the Navy.
1993 - CAPT Marnee Finch became the first woman Commodore as Commander Undersea Surveillance Pacific.
1994 - The Commander Undersea Surveillance Atlantic and Pacific consolidated into one command located in Norfolk, VA. Subsequently, the Command relocated to Dam Neck. Unfortunately, the downsizing of Undersea Surveillance was in full swing. HMCS TRINITY was established at Halifax.
1995 - JMF St. Mawgan was established, replacing NAVFAC Brawdy. SPAWAR PD80 became SPAWAR PD18 and was designated the Intelligence, Surveillance and Reconnaissance (ISR) Directorate.
1995, 19 Apr - Advanced Deployable System (ADS) officially became the newest member of IUSS, entering full scale development as a major program.
1996 - NAVFAC Keflavik ceased operations after 30 years.
1996, 30 Sep - The FDS program successfully reached Full Operational Capability (FOC).
1997 - Following the words of Horace Greeley, the Base Realignment Commission (BRAC) said "Go West, SPAWAR." Throughout this year, SPAWAR completed its move to San Diego, CA.
Begin | 1950's | 1960's | 1970's | 1980's
With the end of the Cold War, SOSUS hydrophone arrays in both the Atlantic and Pacific faced an uncertain future of shutdowns and closings. Consolidation of SOSUS by array retermination, remoting, or closure was complete by FY97. Closures included Bermuda, Adak, and Keflavik. All other arrays will remain operational. SOSUS in the North Pacific is currently being analyzed for low-frequency vocalizations from marine mammals living in the open ocean.
Since the 1950s, the Navy's SOSUS has been supported at sea by a combined effort of AT&T (now Lucent Technologies) and the Military Sealift Command (MSC). The contract awarded to AT&T each year was a sole-source contract, based on its unique capabilities to perform the cable handling at sea. In an attempt to foster competition and reduce the increasing costs of this work, a waiver signed by ASN/RDA, Nora Slatkin, authorized SPAWAR to proceed with a full and open competition. Award was made to a combination of AT&T (Lucent) and MSC at significant savings over the overall estimated cost of the proposed work. Both AT&T and MSC had reviewed their technical needs and business practices and had reduced both the number of people involved in the program, as well as the corporate structure (overhead) necessary to support the work. This award ended a 30+ year sole-source lock on this work and put the Navy in a competitive position for the future.
On 26 April 1999 Lockheed Martin Corp., Manassas, Va., was awarded a $107,031,978 firm-fixed-price contract for Phase II of a deep water, undersea surveillance system. This system is a long life, passive acoustic surveillance system that can be configured for multiple mission applications. It has the capability to provide long-term barrier and field acoustic surveillance, long-range acoustic surveillance coverage of open ocean areas, and acoustic surveillance in areas with high ambient noise. This contract contains one option, which, if exercised, would bring the total cumulative value of this contract to $153,234,288. Work will be performed in Manassas, Va., and is expected to be completed by September 2005. This contract was competitively procured through the Space and Naval Warfare Systems Command electronic commerce web site and Commerce Business Daily with two offers solicited and two offers received. Contract funds will not expire at the end of the fiscal year. The Space and Naval Warfare Systems Command, San Diego, Calif., is the contracting activity (N00039-99-C-2202).
The Mark 60 CAPTOR (Encapsulated Torpedo) is the United States' only deep-water anti-submarine naval mine.
It uses a Mark 46 torpedo contained in an aluminum shell that is anchored to the ocean floor. The mine can be placed by either aircraft, submarine or surface vessel. The torpedo, once placed, can last anywhere from weeks to months underwater. The original production contract of the CAPTOR mine was awarded to Goodyear Aerospace in 1972, and entered service in 1979. It was hoped to reduce minefield costs and used in the creation of a barrier of the "Greenland-Iceland-United Kingdom gap to interrupt Soviet submarines in the event that deterrence failed."
The mine uses Reliable Acoustic Path (RAP) sound propagation to passively identify and track the difference between hostile submarine signatures, surface vessels and friendly submarines. Once identified, the torpedo leaves its casing to destroy its target.
The MK-60 CAPTOR, one of the Navy's primary anti submarine weapons, is actually a deepwater moored torpedo launcher. Mine Mk 60 is a sophisticated anti-submarine warfare (ASW) moored mine which is designed to detect and classify submarines and release a modified Torpedo Mk 46 to acquire and attack submerged targets only. This deep water mine is designed to be laid by aircraft or submarine, and is anchored to the ocean floor. The mine utilizes an influence firing device and is able to classify passing submarines. Its acoustic detection system is designed to seek hostile submarines, ignoring surface craft and friendly submarine acoustic signatures. The weapon lies dormant until a target is detected, at which time the torpedo swims out of its capsule to attack and destroy its target. As in other mines, the Mk 60 incorporates an arming-delay. The MK-60 can be deployed by air, submarine, or surface ship.
This weapon was developed by the Mine Division of the Naval Ordnance Laboratory, which is now located at the Naval Surface Warfare Center Dahlgren Division, Coastal Systems Station, Panama City, Florida. Because it can be converted to have some operational capability in littoral waters, a modification to CAPTOR is being considered as one of the options for the Littoral Sea Mine (LSM) program.
This deep-water ASW mine was conceived about 1960 and developed at NSWC at White Oak. A tentative specific OR was issued in November 1962, the name Captor being selected for a specific OR issued in May 1964. At that time it was hoped that Captor would reduce mine barrier costs by a factor of 100 (and barrier numbers by a factor of 400). The first production contract (for Techeval/Opeval) was awarded to Goodyear Aero-space (now a division of Loral) in 1972. Technical evaluation began in February 1974 and operational evaluation in June. Initial operational capability was achieved in September 1979 and approval for service use granted in February 1980. This very protracted development testifies to the complexity of the sys-tem. In fact, reliability problems prompted a suspension of production in 1980, procurement being resumed in FY82.
Captor (the encapsulated torpedo) is a Mk 46 Mod 4 torpedo encapsulated in a mooring/sensing body that: passively detects and tracks submarines passing overhead. When a supposed track is sufficiently attractive, Captor begins active tracking and then launches the torpedo upward. This mode of operation will work in almost any depth because it utilizes reliable acoustic path (RAP) sound propagation. Determination of the target's initial bearing is by passive acoustic correlation and low-power digital processing, using techniques originally developed for the PUFFS (BQG-2/4) submarine sonar project. The mine body can be air-, surface-, or submarine- (torpedo-tube) launched, and it can moor in water at least 1000 ft deep. Lifetime is several weeks or months. Dimensions (weights) for the air/surface-launched versions are 21 x 145 in (2370 lb); for the submarine-launched version, 21 x 132 in (2056 lb).
During techeval in 1974-February 1975, its detection and classification system suffered from excessive false alarms, and the system was unreliable. However, Captor had shown sufficient potential to warrant further work, and follow-on test and evaluation of initial production units was suggested. Provisional approval for service use (ASU) was granted in January 1976; at this point the production rate was limited to 10 per month. Follow-on test and evaluation, using 10 Captors, began in January 1978. Full-scale production (15/month) was approved in March 1979. At that time the ultimate objective was 5785 Captor mines.
At that time, too, the Captor project included an attempt to control it remotely (RECO) by acoustic signal. This work was still proceeding a decade later; the FY88 program included initial studies of ambient and self noise. RECO now applies to Captor, Quickstrike, and advanced mines of unspecified type. The project is being managed by NSWC White Oak; the con-tractors are APL and Penn State University.
Captor is now being modified to accept a Mk 46 Mod 5 (NEARTIP) torpedo as its warhead. The hardware design for this Mod 1 version was completed under the FY88 program.
Mine Mk 66 is the practice version of Captor.
Procurement began in FY78, the FY78-80 budgets including 1810 Mk 60s. None were bought in FY81, but FY82 included a request for another 400 Captors. Subsequent procurement: FY83, 300; FY84, 300; FY85, 300; FY86, 150 (unrequested). As of 1985, plans called for 475 in FY85, 600 in FY86, 493 in FY87, and none in FY88. Unit cost in FY86, the last year of procurement, was about $377,000. In comparison, the unit cost of Captor was $113,000 in FY78.
(Web, Google, Wikipedia, You Tube)



























Nessun commento:
Posta un commento
Nota. Solo i membri di questo blog possono postare un commento.