

https://svppbellum.blogspot.com/
Blog dedicato agli appassionati di DIFESA, storia militare, sicurezza e tecnologia.
Il Fire Control Radar è un radar specifico preposto al controllo del tiro su di un mezzo militare aereo. Le informazioni fornite da un sistema del genere sono l'azimuth, l'altezza, la distanza e la velocità del potenziale bersaglio per calcolare la cosiddetta soluzione di tiro (ACM). Alcuni radar sono in grado di ingaggiare contemporaneamente più bersagli, e dirigere ad esempio missili su più di un bersaglio in modo indipendente e contemporaneo e, dopo aver distrutto o perso uno dei bersagli, cambiare puntamento in modo più o meno automatico.
I piloti di aerei militari che trasportavano missili semi-attivi hanno avuto difficoltà nel lanciare i missili contro i caccia nemici in un ambiente di manovra di combattimento aereo. I sistemi d’arma missilistici semi-attivi impiegati sono stati progettati per intercettare i bombardieri nemici che tentavano di distruggere o minacciare in altro modo la flotta statunitense e/o le difese continentali. Nella meccanizzazione di questi sistemi, l'angolo di visione del radar di ricerca e controllo del fuoco di tracciamento veniva stabilito per coprire il settore anteriore dell'aereo lanciatore. Nella maggior parte dei casi questo settore consisteva in un cono di illuminazione a microonde di +60 gradi attorno alla linea di riferimento dell'aereo. I missili potevano essere lanciati contro il bersaglio in volo ogni volta che il sistema indicava al pilota che il bersaglio rientrava nel raggio d'azione e che l'aereo era diretto sulla corretta rotta di inseguimento anticipato. Questi lanci venivano effettuati contro bersagli non manovrabili a distanze comprese tra 3 e 15 miglia. Poiché i sistemi erano stati progettati per combattere bersagli non manovrabili, funzionavano abbastanza adeguatamente.
In un ambiente ACM i radar operano nello spazio aereo occupato da aerei militari commerciali e amici, nonché da aerei nemici. A causa della necessità di un'identificazione positiva, tutti i bersagli devono essere identificati visivamente prima del lancio di un missile. Questo requisito modifica lo scenario da un ambiente di intercettazione aerea (AI) senza manovra a un ambiente ACM. La solita situazione ACM si sviluppa quando l'intercettore segue il bersaglio nemico a lungo raggio fino al punto di identificazione visiva, momento in cui o subito dopo il bersaglio passa nella parte posteriore dell'intercettore superando i limiti del gimbal del radar. Immediatamente, il bersaglio torna indietro di 180° verso l'intercettore mentre l'intercettore continua la sua rotta. Dopo aver percorso la rotta per una distanza calcolata, l'intercettore torna indietro verso il bersaglio cercando di mettersi in posizione di lancio del missile.
Spesso, il tempo necessario al sistema radar per riacquisire il bersaglio, cosa che può essere ottenuta solo quando il bersaglio ha raggiunto una posizione nello spazio che rientra nei limiti del gimbal del radar dell'intercettore, impedisce il successo del lancio effettuato di un missile. Quando il bersaglio e l'intercettore virano per mettersi in posizione di tiro, il pilota dell'intercettore deve attendere finché il bersaglio non rientra nei limiti del gimbal del radar. Quindi il radar deve riacquisire il bersaglio, stabilizzarsi per seguirlo, generare segnali relativi alle velocità di avvicinamento e calcolare il punto di lancio corretto in termini di angolo e portata. Nel caso classico non c'è abbastanza tempo perché gli aerei si avvicinino l'uno all'altro per eseguire con successo il lancio del missile.
I sistemi radar multimodali (ovvero sistemi che possono eseguire funzioni diverse, simultaneamente o in rapida sequenza) incorporano antenne direzionali che potrebbero essere necessarie per eseguire la scansione in molti modi diversi. Se un tale sistema deve essere trasportato in volo, come ad esempio da un velivolo ad alte prestazioni, il problema di fornire una tecnica di scansione soddisfacente è particolarmente difficile da risolvere. In tale applicazione, la posizione di un'antenna direzionale è, per ragioni aerodinamiche, limitata all'interno di un radome aerodinamico che costituisce la sezione anteriore del velivolo. Con un'antenna di scansione posizionata in questo modo, il limite del campo di scansione di un raggio scansionato meccanicamente è dell'ordine di 60° dalla linea centrale longitudinale dell'aereo. Un campo di scansione di dimensioni così limitate è troppo piccolo per molte modalità operative. Inoltre, se è richiesta una scansione rapida in azimut ed elevazione, è necessario fornire un meccanismo di scansione meccanico relativamente grande, pesante e potente. Un tale meccanismo di scansione, ovviamente, è dannoso per la capacità ottimale del radar e dell'aereo.
Se un meccanismo di scansione meccanico viene sostituito da un qualsiasi scanner elettronico noto (per consentire una scansione rapida), si incontrano altri tipi di problemi. Ad esempio, poiché la larghezza del fascio proveniente da un'antenna AESA aumenta con l'angolo di scansione, il guadagno dell'antenna diminuisce. Pertanto, con un angolo di scansione diciamo di 60°, l'ampiezza del fascio raddoppia rispetto all'ampiezza del fascio sulla bordata. Tuttavia, poiché un raggio proveniente da un'antenna AESA può essere scansionato molto più rapidamente rispetto al raggio di un'antenna direzionale a scansione meccanica, per il radar aereo multimodale è necessario un qualche tipo di antenna AESA.
Se un'antenna AESA deve essere montata in un radome aerodinamico in un velivolo ad alte prestazioni, si incontrano diversi problemi specifici da tale installazione. Innanzitutto è necessario, per evitare la formazione di lobi reticolari all'interno del campo di scansione, posizionare i singoli elementi dell'antenna AESA il più vicino possibile. Inoltre, il tipo di alimentazione utilizzata per illuminare un Phased Array è importante, essendo necessario utilizzare una sorta di back feed vincolato per evitare il blocco dell'antenna. Qualsiasi sistema noto "alimentato nello spazio" deve essere piegato per adattarsi all'interno del radome, creando così conseguenti problemi di allineamento ed efficienza; e qualsiasi nota "alimentazione radiale" impedisce una disposizione ottimale degli elementi dell'antenna nella schiera.
Le difficoltà sopra menzionate si moltiplicano quando esigenze operative impongono che il radar di un aereo combini elevata potenza e capacità di discriminazione angolare. Per soddisfare i requisiti di potenza, è necessario irradiare una quantità massima di energia a radiofrequenza (concomitante con una forma del fascio soddisfacente) da ciascuno degli elementi dell'antenna. Per consentire l'irradiazione di una tale quantità massima di energia a radiofrequenza, è necessario, nello stato attuale della tecnica, raffreddare gli elementi dell'antenna e i relativi circuiti di controllo. Tale raffreddamento deve essere altrettanto efficace sia ad alta quota che a bassa quota, con il risultato che deve essere fornito un modo positivo di raffreddamento a qualsiasi altitudine operativa. Per soddisfare entrambi i requisiti, il raggio radar deve essere stretto e ben formato, il che implica che vi sia un gran numero di elementi dell'antenna e che la potenza di ciascuno sia controllabile. Per soddisfare i requisiti di discriminazione angolare per molte applicazioni è altamente desiderabile che il radar sia un radar monoimpulso. Qualsiasi alimentazione vincolata nota per un radar monoimpulso comporta l'uso estensivo di linee di trasmissione in guida d'onda e di accoppiatori convenzionali.
Qualsiasi "All Weather Tactical Strike System" (AWTSS) soddisfacente deve, oltre a possedere una capacità di guida per missili guidati aria-terra, avere la capacità di funzionare come ausilio alla navigazione per l'aereo che trasporta l'AWTSS e come acquisizione di bersagli e mezzi di tracciamento. Tutte le funzioni richieste, inoltre, devono essere svolte in un ambiente ostile, ovvero quando l'aereo manovra violentemente per evitare il fuoco d'interdizione e quando il nemico adotta contromisure elettroniche.
Ecco, di seguito, alcuni importanti RADAR AEROPORTATI relativi al periodo 1949/1970:
U.S.A. 1949 - PHANTOM II - RADAR Aero 13, IL PRECURSORE DELL’AN/APQ-120
L'Aero 13 FCR progettato per il Douglas F4D Skyray è all'origine dell'AN/APQ-120 ed ha stabilito la configurazione dell'FCR aviotrasportato non solo per le famiglie di radar AN/APQ-120, ma anche uno standard per tutti gli altri radar aviotrasportati a seguire: l'Aero 13 FCR è stato progettato come un modulo cilindrico integrato che poteva essere collegato al muso di un velivolo, invece di un insieme di scatole nere semi-indipendenti.





L'AN/APQ-120 era un radar di controllo del fuoco per aerei (FCR) prodotto dalla Westinghouse per il McDonnell Douglas F-4E Phantom II. L'AN/APQ-120 ha una lunga linea di discendenza, le cui origini risalgono all'Aero-13 FCR sviluppato dalla stessa azienda all'inizio degli anni '50. Un totale di una mezza dozzina di FCR furono testati e valutati sui primi 18 F-4 costruiti, ma furono presto sostituiti da radar successivi prodotti in gran numero, incluso l'AN/APQ-120.
Aero 1A: L’Aero 13 non aveva alcuna capacità per missili aria-aria (AAM) con radar homing semi-attivo (SARH). 1A FCR è stato sviluppato per aggiungere questa funzionalità incorporando un illuminatore a onda continua per gli AAM SARH. Questa configurazione dell'Aero 1A rimase invariata per i radar successivi per gli F-4 fino all'AN/APQ-50.
AN/APQ-35: Il radar successivo da installare sui prototipi e sulle serie di pre-produzione dell'F-4 fu l'AN/APQ-35, che in realtà consisteva di due radar: il radar di ricerca AN/APS-21 che poteva localizzare bersagli delle dimensioni di un caccia a una distanza di 32 chilometri (20 miglia) e il radar di puntamento AN/APS-26, con una portata di 3,2 chilometri (2 miglia).
AN/APQ-36: l’AN/APQ-36 rappresentava un miglioramento rispetto al precedente AN/APQ-35, e quando l'AN/APQ-36 entrò in servizio sul Douglas F3D Skyknight e sul Vought F7U Cutlass, era il più grande FCR aviotrasportato del suo tempo. Il più potente AN/APQ-36 di grandi dimensioni non ebbe problemi ad essere installato sui prototipi dell’F-4, in modo da poter sviluppare FCR più potenti e di dimensioni maggiori.
AN/APQ-41: l’AN/APQ-41 rappresentava un miglioramento rispetto all'AN/APQ-36 ed era progettato per fornire intercettazione aerea, ricerca, tracciamento automatico di un bersaglio selezionato e per fornire informazioni sull'angolo di anticipo e sulla portata. Furono inoltre fornite strutture per la ricerca aria-superficie, per l'interrogazione del radiofaro e la visualizzazione della risposta e per la visualizzazione della risposta quando utilizzata in connessione con l' identificazione amico o nemico (IFF).
Specifiche:
- Portata di ricerca o mira con la pistola: 24 nm max, 200 yd min
- Portata di mappatura del terreno: 100 nm
- Portata del faro: 200 nm
- Previsione affidabile della mira della pistola: 2.000 iarde max
- Precisione di tracciamento: 25 iarde entro gli intervalli di 200 e 2.000 iarde
- Precisione della portata futura: 25 iarde
- Azimut (ricerca): 106,5 gradi
- Elevazione (ricerca): 13 gradi (entro 30 gradi dalla linea centrale dell'aeromobile)
- Azimut (traccia): 116,5 gradi
- Altitudine (traccia): 116,5 gradi
- Precisione (Ricerca e Traccia): 4% tutte le indicazioni.
Tipo di presentazione:
- B-scope (ricerca): azimut e portata del target, stroboscopio, indicatori di distanza, radiofaro e risposte IFF
- C-scope (ricerca) - Strobo target, bersagli, a cavallo del flash di distanza, linea dell'orizzonte artificiale, modello di scansione
- C-scope (Traccia) - Punto target, cerchio e punto della portata, linea dell'orizzonte artificiale.
- Indicatore di portata fissa: indicatori di 25 miglia su scale di 100 e 200 miglia
- Frequenza Radar (Ricerca e Traccia): 9375 30 mc
- Frequenza Faro: Trasmittente, 9375 30 mc; ricevente, 9310 1 mc
- Temperatura operativa: da -55 a +55 gradi C
- Limite di altitudine: 52.000 piedi.
AN/APQ-46: l’AN/APQ-46 è l'ultimo radar testato e valutato su prototipi di F-4 e serie di pre-produzione. L'F-4 equipaggiato con questo radar era stato specificamente modificato per soddisfare i requisiti degli aerei di contromisura elettronica Ferret della Marina statunitense, che alla fine non si sono materializzati.
AN/APQ-50: l’AN/APQ-50 è il radar installato sul lotto di produzione iniziale di F-4 a bassa velocità, ma come con i radar precedenti, non è stato utilizzato in gran numero rispetto ai radar successivi della stessa famiglia. L'antenna parabolica aveva un diametro di 24 pollici e, oltre a fornire funzionalità in qualsiasi condizione atmosferica, l'AN/APQ-50 FCR forniva anche informazioni sul lancio automatico dei razzi.
AN/APQ-72: l’AN/APQ-72 FCR era uno sviluppo dell'AN/APQ-50, con il diametro dell'antenna aumentato di un terzo a 32 pollici rispetto ai 24 pollici originali dell'AN/APQ-50. L'illuminatore CW AN/APA-128 era integrato con il radar per conferirgli la capacità di AAM guidati da radar. L'AN/APQ-72 è stato il primo radar installato sugli F-4 ad essere costruito in gran numero, a partire dal 19° F-4 prodotto.
AN/APG-59: l’AN/APG-59 FCR era un AN/APQ-72 modificato progettato per gli inglesi. La differenza principale tra l'AN/APG-59 e il suo predecessore era che la parabola radar poteva essere ruotata lateralmente per ridurre la lunghezza dell'aereo a 54 piedi in modo che potesse adattarsi ai piccoli elevatori del ponte delle portaerei britanniche. Utilizzato nell'AN/AWG-10.
AN/APQ-100: l'AN/APQ-100 è il sostituto dell'AN/APQ-72 e presentava un mirino radar ridisegnato nella cabina di pilotaggio posteriore che offriva un'opzione di visualizzazione della mappatura dell'indicatore di posizione del piano (PPI) e uno stroboscopio a portata regolabile per i bombardamenti. Per le missioni aria-terra, il radar si interfacciava con la piattaforma inerziale degli F-4.
AN/APG-60: l’AN/APQ-100 era stato modificato per i britannici per sostituire l'AN/APG-59. Come l'AN/APG-59, anche l'AN/APG-60 aveva una parabola radar che poteva essere ruotata lateralmente per ridurre la lunghezza dell'aereo a 54 piedi in modo che potesse adattarsi ai piccoli ascensori del ponte delle portaerei britanniche. L'AN/APG-60 è stato successivamente aggiornato con funzionalità Doppler durante i suoi aggiornamenti e integrato nell'AN/AWG-11.
AN/APQ-109: L’AN/APQ-109 era un miglioramento del precedente AN/APQ-100 con un display della cabina di pilotaggio migliorato in grado di gestire immagini televisive provenienti da armi come l'AGM-62 Walleye. Altre aggiunte significative includevano la portata aria-terra, l'identificazione dei fari terrestri e le funzionalità di visualizzazione. L'AN/APQ-109 era una versione "ibrida" migliorata e più affidabile dell'AN/APQ-100 con componenti a stato solido nelle sezioni a bassa tensione.
AN/APG-61: AN/APQ-109 modificato per gli inglesi per sostituire AN/APG-60. Come l'AN/APG-59/60, anche l'AN/APG-61 aveva una parabola radar che poteva essere ruotata lateralmente per ridurre la lunghezza dell'aereo a 54 piedi in modo che potesse adattarsi ai piccoli ascensori del ponte delle portaerei britanniche. Utilizzato nell'AN/AWG-12.
AN/APQ-117: Radar di attacco e monitoraggio del terreno AN/APQ-117, sviluppato dal precedente AN/APQ-109, con aggiunta della capacità di seguire il terreno.
AN/APQ-120: Un radar completamente allo stato solido sviluppato dall'AN/APQ-117, il radar AN/APQ-120 era molto più compatto dei suoi predecessori, consentendogli di adattarsi al muso insieme al cannone, e il radar fu successivamente integrato nell'AN/ AWG-14.
AN/AWG-10: L’AN/AWG sta per (A) Aereo Pilotato (W) Armamento (G) Controllo del Fuoco. AN/APG-59 è stato il primo FCR integrato in AN/AWG-10, sviluppato in altre due versioni, A e B. L'AN/AWG-10 originale poteva rilevare un bersaglio aereo con una sezione radar di 5 metri quadrati più di 100 Km di distanza.
AN/AWG-10A è uno sviluppo dell'originale AN/AWG-10, con grande miglioramento in termini di affidabilità e manutenibilità sostituendo il trasmettitore originale in AN/AWG-10 con un'unità a stato solido la cui unica valvola era un amplificatore di potenza Klystron. L'aggiunta di un computer digitale aveva consentito equazioni di lancio missilistici molto più efficaci. L'AN/AWG-10A incorporava anche un nuovo mirino ottico servoassistito. Furono aggiunte anche nuove modalità come la modalità punto di impatto visualizzato continuamente, la modalità impatto visualizzato congelato e la modalità visiva rilasciata dal computer. L’AN/AWG-10B era una versione ulteriormente digitalizzata dell'AN/AWG-10/10A ma conservava molti circuiti analogici. Un AVC (cambiamento avionico) chiave era stata la sostituzione dell'inaffidabile analizzatore di spettro Doppler (DSA) con un affidabile processore di spettro digitale (DSP) che aveva anche aumentato la precisione durante il funzionamento in modalità doppler.
AN/AWG-11: L’AN/AWG-11 era un AN/AWG-10 britannico costruito su licenza dalla Ferranti. Il radar utilizzato era AN/APG-60 e AN/AWG-11 era un AN/AWG-10 leggermente modificato in quanto è compatibile con AGM-12 Bullpup e WE.177, in modo che gli F-4 britannici potessero eseguire missioni di attacco nucleare se necessario.
AN/AWG-12: L’AN/AWG-12 era un AN/AWG-11 migliorato costruito da Ferranti con AN/APG-61 FCR. La differenza principale tra AN/AWG-11 e AN/AWG-12 era che quest'ultimo aveva una migliore modalità di mappatura del terreno e poteva anche controllare un SUU-23/A Vulcan montato sul ventre. L'AN/AWG-12 andò finalmente in pensione nel 1992, quando gli ultimi F-4 nel servizio britannico andarono in pensione e, durante la sua vita utile, fu aggiornato con miglioramenti dell'AN/AWG-10A/B.
AN/AWG-14: L’AN/AWG-14 è stato l'ultimo membro della stirpe di questa famiglia di radar ed era un aggiornamento completamente digitalizzato della serie AWG che incorpora l'AN/APQ-120. L'architettura aperta e il design modulare consentivano all'AWG-14 di ospitare diversi radar, come AN/APG-65, AN/APG-66, AN/APG-76, Elta EL/M-2011/2021 ed EL/M-2032.
GRAN BRETAGNA 1951 - BAC LIGHTINING, BUCCANEER e J35 DRAKEN - RADAR AIRPASS AI.23
Era un radar di intercettazione aerea britannico e un sistema radar di controllo del fuoco sviluppato dalla britannica Ferranti.






_Page_06-960.jpeg)




È stato il primo sistema radar monoimpulso aereo al mondo e ha fornito dati al primo display head-up al mondo. Il nome è l'acronimo di "Airborne Interception Radar and Pilot's Attack Sight System". Nella Royal Air Force (RAF) gli venne dato il nome ufficiale Radar, Airborne Interception, Mark 23, normalmente abbreviato in AI.23. L’AIRPASS è stato utilizzato sull'English Electric Lightning per tutta la sua vita.
Il sistema elettronico di base AIRPASS è stato successivamente adattato come base per un radar che segue il terreno per la navigazione e il targeting per attacchi aria-terra. Questo AIRPASS II era originariamente destinato al BAC TSR.2, ma quando il velivolo fu cancellato nel 1965, fu successivamente utilizzato nel Blackburn Buccaneer. Elementi del design AIRPASS furono utilizzati su molti radar successivi della Ferranti, mentre il suo display head-up fu concesso in licenza per l'uso negli Stati Uniti dove fu rapidamente adottato per molti aerei. Lo sviluppo del radar monoimpulso alla base dell'AIRPASS iniziò nel 1951. Il sistema AIRPASS fu annunciato al pubblico alla fine di giugno 1958. Fu inizialmente testato su Douglas DC-3 TS423 (successivamente registrato come civile G-DAKS) e successivamente su di un English Electric Canberra WJ643 per prove ad alta velocità, sostituendo le sezioni del muso di questi velivoli. Dopo il test di utilizzo, il WJ643 fu ribattezzato T.Mk 11 e utilizzato come aereo da addestramento per gli operatori radar del Gloster Javelin. Furono prodotti diversi altri T.Mk 11, ma questi montavano l'AI.17 del Javelin. Il primo volo dell'English Electric Lightning ebbe luogo sulla cellula XG312 il 29 dicembre 1958.
Entrò in servizio sugli aerei intercettori dall'inizio degli anni '60. Inizialmente era collegato al missile aria-aria de Havilland Firestreak. L’AIRPASS venne sviluppato dalla Ferranti Ltd su Ferry Road a Edimburgo. Introdusse il sistema HOTAS (Hands On Throttle-And-Stick) in base al quale i controlli del radar e del mirino erano situati sulla colonna di controllo e sulla leva dell'acceleratore invece che altrove nella cabina di pilotaggio, eliminando la necessità per il pilota di togliere le mani dai controlli mentre effettuava un'intercettazione.
Il radar entrò in servizio presso la RAF nel 1960 a bordo dell'intercettore inglese Electric Lightning. La versione successiva del sistema si chiamava AIRPASS II, o "Blue Parrot", ed era un sistema ottimizzato per l'uso a basso livello e originariamente sviluppato per il BAC TSR.2 cancellato e successivamente utilizzato nel Blackburn Buccaneer.
Il radar AIRPASS era basato su di una sorgente magnetron che forniva impulsi di circa 100 kW di picco. Gli impulsi avevano una durata di circa un microsecondo e venivano inviati 1000 volte al secondo. Per rendere il sistema il più compatto possibile, Ferranti aveva investito in un sistema a controllo numerico per fresare le guide d'onda da singoli blocchi di alluminio. Il segnale veniva inviato e ricevuto da feedhorn divisi verticalmente per produrre due uscite, una su ciascun lato della linea centrale del riflettore. Il riflettore aveva la forma di due paraboloidi parziali, in modo che i due segnali si ricombinassero nello spazio davanti all'aereo. L'intero gruppo era stato montato su di un servosistema che aveva permesso di puntare il gruppo dell'antenna in due dimensioni.
Alla ricezione di un impulso, il segnale veniva inviato ad un oscillatore locale klystron e quindi a due ricevitori supereterodina convenzionali con una frequenza intermedia di 30 MHz. La tecnica monopulse richiede che i segnali dei due canali vengano confrontati in termini di intensità, quindi l'uscita degli amplificatori deve essere abbinata con precisione. Ciò era stato ottenuto con un sistema di controllo automatico del guadagno altamente avanzato con una gamma di 100 dB che regolava le uscite da impulso a impulso. Fino a questo punto il sistema era del tutto analogico, utilizzando tubi a vuoto miniaturizzati raffreddati ad aria forzata.
Dietro la sezione analogica c'era la parte analogica del computer del sistema. Ciò aveva preso gli output dal sistema radar, calcolato la rotta di intercettazione corretta in base all'arma selezionata e presentato i risultati nel meccanismo di mira del riflettore. Il sistema leggeva anche i dati provenienti da vari sistemi dell'aereo come l'altimetro e l'indicatore della velocità dell'aria e li combinava nello stesso display. Il risultato fu il primo display heads-up al mondo, un concetto che fu presto concesso in licenza ai produttori statunitensi.
L'AIRPASS aveva un raggio di rilevamento medio contro un bombardiere Tupolev Tu-95 "Bear" di circa 40 miglia (64 km). Ciò era più che sufficiente per consentire al BAC Lightning di essere diretto nell'area generale del bersaglio attraverso l'intercettazione controllata da terra e quindi utilizzare l’AIRPASS per dargli la caccia. Fu presa in considerazione l'idea di inviare l'aereo nell'area giusta utilizzando i comandi inviati da terra all'autopilota dell'aereo, consentendo al pilota di concentrarsi esclusivamente sullo schermo radar, ma questo progetto alla fine venne annullato.
I modelli successivi dell'AI.23B, aggiungevano piccole antenne aggiuntive per la ricezione in banda S dei segnali dai radar terrestri. Ciò aveva permesso all'aereo di cercare bersagli con il proprio trasmettitore radar spento. Il segnale veniva visualizzato in modalità A-scope lungo la parte inferiore del display del radar, che il pilota poteva utilizzare per cercare bersagli mentre era in direzione del suolo. Quando appariva un picco dell'altezza richiesta, il pilota prendeva il comando dell'avvicinamento e poi accendeva il proprio radar quando le condizioni apparivano corrette. Ciò aveva consentito all'aereo di effettuare avvicinamenti accurati senza segnalare la propria presenza o provocare disturbi dal bersaglio. Lo stesso sistema fu utilizzato nella banda E/F per fornire home-on-jam.
AIRPASS II: Alla fine degli anni '50, Ferranti vinse il contratto per la fornitura di radar per l'aereo Blackburn Buccaneer in servizio nella Royal Navy. Questa versione AIRPASS II (conosciuta anche con il nome in codice arcobaleno Blue Parrot), venne modificata per gestire la scansione a basso livello eliminando i riflessi delle onde. Poiché le onde riflettevano gran parte del segnale, per compensare queste perdite la nuova versione utilizzava un trasmettitore più potente da 250 kW e un'antenna Cassegrain più grande.
Durante i test dei sistemi monopulse, gli ingegneri Ferranti avevano notato che i sistemi producevano informazioni di alta qualità sulle riflessioni del terreno. I sistemi più vecchi senza elaborazione monopulse rendevano difficile la determinazione della portata poiché i segnali di ritorno del radar provenivano dall'intera larghezza del fascio, il che significava che riceveva segnali provenienti dal suolo più vicino e più lontano dall'aereo. L'elaborazione monoimpulso aveva consentito di discriminare il raggio verticalmente e quindi di spaziare rispetto a un singolo elemento in modo molto accurato.
La capacità del radar di produrre misurazioni della distanza estremamente accurate, combinata con un sistema che visualizzava i dati risultanti come una mappa, aveva aperto la possibilità di produrre un sistema di guida radar che segue il terreno. La Ferranti sviluppò ampiamente questo concetto nel corso degli anni '60, prima con i suoi aerei Dakota e Canberra, e successivamente con il Buccaneer.
L'idea era semplice: il computer calcolava una traiettoria ideale a forma di rampa da sci, piatta direttamente sotto l'aereo e poi inclinata verso l'alto con una dolce curva. Questo modello veniva ruotato per seguire il vettore di velocità dell'aereo. Il radar eseguiva la scansione secondo uno schema a forma di U, effettuando misurazioni accurate dell'altitudine e della portata degli oggetti davanti e leggermente su entrambi i lati dell'aereo. Il computer confrontava la portata e l'altitudine degli oggetti nel radar con il percorso pre-calcolato, quindi ruotava il percorso in modo che l'elemento del terreno venisse sorvolato ad un'altitudine preimpostata tra 60 e 300 metri (200 e 980 piedi). Questo veniva trasmesso al pilota come un punto nell'heads-up display e, seguendo il punto, l'aereo tentava di mantenere l'altitudine selezionata alzando o abbassando continuamente il punto mentre il terreno scorreva. La curva a forma di sci era stata scelta per garantire che tutte le manovre richieste fossero a metà gravità, riducendo i carichi sull'equipaggio.
Il concetto divenne la base per lo sfortunato progetto BAC TSR-2, che utilizzava un'altra versione modificata dell'hardware AIRPASS, all’epoca ampiamente transistorizzato.
Nell'ambito di una proposta per l'aeronautica militare svizzera, Saab AB aveva modificato un singolo Saab 35 Draken sostituendo il suo sistema radar relativamente semplice con un radar AIRPASS II. Questo aveva prodotto la Saab J35H (H per Helvetia), ma alla fine il contratto fu vinto dal Mirage III. Il radar dell'AIRPASS I pesava circa 90 kg.
U.S.A. 1954 - L’F-102A di produzione aveva il RADAR Hughes MC-3 FCS, che fu successivamente aggiornato in servizio alla versione MG-10.
Il sistema veniva utilizzato per localizzare obiettivi nemici, orientare le rotte di intercettazione e controllare il dispiegamento delle armi.


L'F-102 fu il primo caccia USAF ad essere progettato senza cannone, affidandosi invece ai missili come armamento primario. Aveva un vano armi interno a tre segmenti sotto la fusoliera per i missili aria-aria. L'armamento iniziale era costituito da tre paia di missili Falcon GAR-1/2/3/4 (successivamente ribattezzati AIM-4), che includevano sia varianti di homing a infrarossi che varianti di homing radar semi-attivo. Le porte dei due vani di prua avevano ciascuna tubi per 12 FFAR (per un totale di 24) di cui inizialmente erano montati 2 pollici (5,1 cm) e successivamente 2,75 pollici (70 mm) in sostituzione. L'F-102 fu successivamente aggiornato per consentire il trasporto di un massimo di due missili GAR-11/AIM-26 Nuclear Falcon nella baia centrale. Le dimensioni maggiori di quest'arma richiedevano porte del vano centrale ridisegnate. Furono presi in considerazione i piani per adattare il razzo nucleare MB-1 Genie al progetto, ma sebbene un Genie fosse stato lanciato in prova da un YF-102A nel maggio 1956, non fu mai adottato.
L'MG-3 e l’MG-10: Il successivo FCS progettato per impiegare il missile Falcon emerse come un altro sistema E-9 modificato, l'MG-3. L'MG-3 rappresentava la parte FCS del sistema di controllo degli aerei e delle armi MG-10 per l'F-102. L'MG-10 comprendeva l'MG-3 FCS, il collegamento dati AN/ARR-44, un sistema di atterraggio strumentale automatizzato e i componenti elettronici associati.
L'equipaggio dell'F-102 rappresentò il primo grande ostacolo affrontato dalla Hughes nello sviluppo dell'MG-3. Prima di questo punto, gli intercettori equipaggiati con l'E-9 o l'MG-12 avevano due membri d'equipaggio: un pilota e un FCO. Con l'F-102 progettato come intercettore monoposto, la Hughes dovette modificare l'E-9 per funzionare con un singolo operatore. L'MG-3 manteneva il radar, il computer "F" e gli ausiliari missilistici dell'E-9 e incorporava il sistema di identificazione del caccia dell'MG-12.
In seguito al lavoro preliminare sulla capacità di aggancio dell'MG-12, nel 1954 l'USAF ordinò alla Hughes di espandere la capacità ad alta quota dell'MG-3. Ciò aveva comportato l'inclusione sia della capacità di attacco a scatto che del nuovo GAR-1D. Nel novembre del 1956, l'USAF ordinò formalmente l'inclusione di razzi da 2,75 pollici nel sistema d'arma dell'F-102, richiedendo ulteriori modifiche all'MG-3.
L'MG-3 prevedeva tre modalità operative per l'impiego dei missili Falcon. La modalità di collisione anticipata del radar consentiva il lancio automatico o manuale dei Falcon guidati dal radar. L'inseguimento ottico e l'inseguimento ottico puro rappresentavano modalità di ingaggio puramente manuali che consentivano l'impiego di Falcon guidati da radar o IR.
Sebbene l'AN/ARR-44 abbia sofferto un lungo periodo di sviluppo, aveva migliorato significativamente la capacità dell'FCS quando fu operativo. I segnali di ingresso AN/ARR-44 dal sistema SAGE EW/GCI al sistema MG-10. La SAGE aveva inserito i contatti radar nell'MG-10, con il sistema di identificazione del caccia che identificava un bersaglio. SAGE controllava l'F-102 durante la crociera verso il bersaglio fornendo input al pilota automatico. L'FCS utilizzava il collegamento alla superficie di controllo per dirigere l'aereo durante l'intercettazione, con il rilascio delle armi che avveniva automaticamente. A seguito di un ingaggio, SAGE forniva input al pilota automatico per riportare l'intercettore alla base.
U.S.A. 1954 - F-104A - RADAR RCA AN/ASG-14 T1
Questo radar era stato progettato dalla RCA con un'antenna MA-10 per il modello F-104A (specifica del modello 183-92-02). Era la prima versione di produzione dell’F-104: 153 velivoli furono costruiti tra il 1956 e il 1957. Destinati come intercettori al TAC (Tactic Air Command) e successivamente all'ADC (Area Defense Counsel) e alla Guardia Nazionale.

I primi caccia stellari dell'USAF avevano un radar RCA AN/ASG-14T1 di base, un sistema di navigazione aerea tattica (TACAN) e una radio UHF AN/ARC-34. Il sistema di controllo del tiro AN/ASG-14 utilizzava un'antenna radar da 24 pollici (610 mm) con due mirini indipendenti: uno ottico e uno a infrarossi. Le prime versioni del radar avevano una portata di circa 20 miglia (32 km) in modalità di ricerca, con i modelli successivi che arrivavano fino a 40 miglia (64 km); il modello di scansione era a spirale e copriva un cono di 90°. La modalità di ricerca era utilizzabile solo al di sopra di 3.000 piedi (910 m) a causa degli effetti di ritorno del suolo al di sotto di tale altitudine. La modalità traccia era utilizzabile entro 10 miglia (16 km) dal bersaglio, che restringeva la scansione a 20° e avviava una scansione stroboscopica tra 300 e 3.000 iarde (270 e 2.740 m) in modalità di acquisizione automatica. Il radar aveva anche una terza modalità di sola ricezione, utile per agganciare fonti di interferenza provenienti da contromisure elettroniche (ECM).
USA / ITALIA 1959 - F-104S - RADAR NASARR F15G - FIAR/NASARR R-21G/M1
Alla fine degli anni '60, Lockheed sviluppò una versione più avanzata dello Starfighter, l'F-104S, per l'utilizzo da parte dell'Aeronautica Militare italiana.

Analogamente all'F-104G, la Lockheed aveva prodotto due varianti principali dell'F-104S: un intercettore ogni-tempo (caccia intercettore, CI) e un aereo d'attacco (caccia bombardiere, CB). La variante CI aveva ricevuto un radar FIAR/NASARR F15G con capacità di guida AIM-7 Sparrow; tuttavia, la nuova avionica di guida missilistica era andata a scapito del cannone M61A1 Vulcan, che era stato rimosso per fare spazio. La variante CB era equipaggiata con un radar FIAR/NASARR R21G-H e un altimetro radar per missioni di attacco a bassa quota, mantenendo il cannone come unica arma aria-aria.
Come parte dell'Aggiornamento Sistema d'Arma (ASA), o "Aggiornamento del sistema d'arma" a metà degli anni '80, entrambe le varianti furono dotate di un ECM ALQ-70/72 e di un radar FIAR/NASARR R-21G/M1 con salto di frequenza e capacità di avvistamento/abbattimento. I nuovi sistemi radar e di guida avevano consentito all'aereo di trasportare il nuovo missile a guida infrarossa AIM-9L Sidewinder (in sostituzione del vecchio AIM-9B), nonché i missili a guida radar AIM-7 Sparrow e Selenia Aspide.
Con la direzione di tiro NASARR R-21G/H il pilota poteva fare la mappatura del terreno e fu introdotta la funzione di avviso collisione in caso di volo a bassa quota, nelle missioni aria-superficie. La sua costruzione venne iniziata dalla FIAR dopo il 12° esemplare, fornito dalla N.A.A. Autonetics. Al posto del cannone Vulcan era possibile un serbatoio da 462 litri. Questi ultimi avevano il NASARR F-15G con illuminatore CW, ma non avevano lo spazio per il cannone Vulcan. Per tutto il resto, l'avionica era pressoché uguale a quella del ‘104G.
Fatto molto importante, la Selenia iniziò a produrre i missili Sparrow III e la FIAR (azienda milanese già attiva nel settore elettronico) il radar NASARR R-21-G (assieme alla NAA Autonetics Division).
Questo gettò le basi per una crescita tecnologica dell’industria italiana: pensate l'importanza del radar in questione che diede impulso tecnologico alla FIAR per progettare e costruire sistemi molto più moderni, come la famiglia Grifo e l'attuale parte nel programma EF-2000A (includendo anche l'IRST Pirate).
Mentre la Selenia acquisiva il know-how del missile aria-aria a guida radar Sparrow III, lavorava alacremente per superarne i limiti tecnologici; subito dopo, la Selenia fu in grado di mettere a punto l'Aspide, il missile italiano di maggior successo: tale capacità fu conseguita grazie all'esperienza maturata con la compatibilità con lo Sparrow III, prodotto dalla Selenia in 1.000 esemplari.
Il nuovo motore più potente dell’F104S era talmente valido, anche a ‘secco’, che non si riusciva a tenerlo al 100% dei giri nemmeno in ‘military’; la velocità massima arrivava adesso a mach 2.2+, il che però dovette far arretrare la presa d’aria per adeguarla alla posizione delle onde d’urto.
La potenza del ‘104S era anche aiutata dal fatto che il motore aveva un post-bruciatore totalmente modulabile, un notevole vantaggio rispetto al ‘tutto acceso’ o spento del precedente G. Le prese d’aria ausiliarie, in modalità ‘auto’ avevano un funzionamento automatico, per cui si richiudevano a seconda delle condizioni. Inoltre il sistema di controllo del carburante era automatico (una specie di FADEC analogico), diverso dal ‘104G in cui il pilota aveva sempre sul tachimetro il 100% dei giri quando metteva la manetta a piena potenza. I giri del motore, sul '104S, erano regolati automaticamente sopra mach 1,5. La potenza dell’aereo era incrementata anche per i generatori di corrente, perché assieme al missile doveva essere anche previsto l’illuminatore CW, sistemato nella ‘gun bay’.
U.S.A. 1955 - F-8E CRUSADER - RADAR AN/APQ-94, un aggiornamento dell’AN/APQ-83B.
U.R.S.S. 1959 - MIG-21 - RADAR RP-21 Sapfir (nome in codice NATO: Spin Scan)
L'RP-21 Sapfir (Spin Scan) era un sistema radar sviluppato dall'Unione Sovietica per essere utilizzato sul caccia MiG-21PF aggiornato e utilizzato nelle versioni successive del MiG-21.


.jpeg)





Le prime varianti del caccia MiG-21, MiG-21F e MiG-21F-13, erano velivoli diurni operativi con tempo sereno. Sebbene fossero in uso presso l'aviazione frontale dell'aeronautica sovietica (VVS FA), a causa dei loro limiti, non erano adatti ai compiti di intercettazione delle forze di difesa aerea sovietiche (PVO). L’OKB Mikoian iniziò lo sviluppo di un intercettore più sofisticato, basato sul MiG-21F-13 alla fine degli anni '50. Il MiG-21P e il MiG-21PF furono i primi MiG-21 ad essere dotati di un vero radar che avrebbe consentito loro di cercare, tracciare e intercettare bersagli di notte e in caso di maltempo: il radar RP-21 Sapfir ("Sapphire"), a cui fu dato il nome in codice NATO di "Spin Scan-A".
L'RP-21 Sapfir sostituì il radar di rilevamento SRD-5M Kvantum ("Quantum") del MiG-21F-13. L'RP-21 era dotato di un'antenna radar stabilizzata con guida meccanica e giroscopica e aveva un circuito con valvola termoionica (tubi a vuoto). In teoria era in grado di rilevare bersagli delle dimensioni di un caccia da una distanza di 20 km e di agganciarli ad una distanza di 10 km, sebbene in pratica questa portata si riducesse rispettivamente a 13 km e 7 km. L'arma associata era il missile aria-aria a guida infrarossa Vympel K-13, noto anche come R-3S, oggetto 310 o AA-2 "Atoll-A" della NATO, già in uso con il vecchio radar SRD-5M. Successivamente, le versioni più recenti dell'aereo (vale a dire la MiG-21PFS) utilizzarono il radar RP-21M ulteriormente aggiornato (nome in codice NATO "Spin Scan-B"), che consentì l’utilizzo del missile a guida radar (SARH), il nuovo R -3R (nome in codice NATO AA-2 "Atoll-B").
Nonostante si trattasse di un grande miglioramento rispetto al vecchio SRD-5M, le nuove capacità di intercettazione erano ancora limitate, principalmente a causa di un difetto di progettazione intrinseco del MiG-21: l'ingresso del muso limitava le dimensioni del piccolo cono radar, quindi il campo radar era limitato a 20° verticalmente e 60° orizzontalmente. Anche nelle ultime copie cinesi F-7MG del MiG-21 (equipaggiate con radar israeliani e italiani più avanzati) si ritiene che questo sia stato ancora un fattore limitante significativo per l'utilizzo del radar. Inoltre, a causa dell'elettronica a tubi a vuoto, il sistema radar (come la maggior parte degli altri radar di prima generazione) aveva un tempo medio tra i guasti (MTBF) basso. Il radar non aveva capacità di avvistamento/abbattimento (sebbene questa non fosse affatto una caratteristica comune dei sistemi radar dell'epoca), il che significa che non poteva intercettare bersagli che volavano al di sotto del MiG-21, perché il sistema radar non era in grado di filtrare il ritorno del "disturbo del terreno". Un altro svantaggio del nuovo radar (e di altri sistemi avionici) era l'aumento di peso del MiG-21 PF, che riduceva le caratteristiche di volo altrimenti notevoli del MiG-21 di base.
Il radar era semplice da usare e riparare e, grazie alla tecnologia dei tubi a vuoto, era in grado di resistere a un potente impulso elettromagnetico (EMP), un effetto collaterale dell'esplosione nucleare, una radiazione innocua per l'uomo ma molto dannosa per i moderni sistemi allo stato solido. Le sue capacità, per quanto limitate possano sembrare, erano controbilanciate dalla dottrina standard PVO: i piloti erano legati ad un sistema di intercettazione controllata a terra (GCI) che, attraverso radar e collegamenti dati a terra, forniva gli intercettori precise informazioni tattiche.
Nel corso degli anni, l'Occidente conobbe maggiormente l'RP-21 Sapfir durante la guerra del Vietnam in Indocina e durante le guerre dei Sei Giorni e dello Yom Kippur in Medio Oriente. Il suo record di combattimento non era impressionante, soprattutto a causa dei primitivi e sopravvalutati missili a guida radar R-3R di prima generazione. Inoltre, il radar fu compromesso piuttosto rapidamente a causa di defezioni, e le sue debolezze erano ben note all’Occidente, dando il via alla creazione di efficaci contromisure elettroniche (ECM). I piloti occidentali impararono presto a distinguere l'impulso ritmico a tre toni dell'RP-21.
Tuttavia, l'RP-21 e i suoi sviluppi, come il radar RP-22 (nome in codice NATO "Jay Bird") della successiva serie MiG-21bis, hanno avuto una lunga carriera e quest'ultimo è stato utilizzato anche per scopi di esportazione nel MiG-23S declassato e degli intercettori MiG-23MS.
FRANCIA 1960 - MIRAGE III e J-35 Draken - I RADAR Cyrano, una famiglia di radar francesi, prodotti dalla Compagnie Générale de la Télégraphie Sans Fil (CSF).
Questi radar furono originariamente utilizzati sul Mirage III C e sul Saab 35 Draken, e poi in varianti in continua evoluzione su diversi modelli di aerei della Dassault Aviation e del SEPECAT Jaguar.



Il Cyrano I fu sviluppato a partire dal 1958 per l'aeronautica francese dalla CSF.
Il radar monopulse Cyrano I è situato nel muso dell'aereo, in un involucro pressurizzato. L'antenna, con un diametro di 0,36 m, è mobile sia in inclinazione che in azimut, utilizzando servomeccanismi. Include un trasmettitore e un ricevitore. Il trasmettitore, con potenza di picco di 300 kW nella banda (λ = 3 cm), è un magnetron di tipo 4J 50. Il ricevitore ha una figura di rumore di 9 dB, con mixer e preamplificatori. L'intero sistema è costituito da tubi subminiaturizzati dei tipi 6111 e 61126, disposti in 30 file contenenti 9, 7 o 5 tubi.
Il raffreddamento era assicurato da una circolazione di acqua e glicole.
Il radar disponeva di un'elettronica analogica responsabile dell'elaborazione del segnale, della telemetria, delle misurazioni della deviazione, dei controlli dell'antenna, nonché dei comandi di navigazione inviati ai missili prima e dopo il lancio.
Il radar era progettato per l'intercettazione dei bombardieri che volavano ad alta quota. Includeva funzioni di rilevamento, tracciamento, navigazione automatica, guida missilistica e mappatura del terreno e dei contorni. Consentiva di guidare il tiro dei cannoni DEFA e ADEN da 30 mm e guidare i missili Matra R511 e R530, con una portata adattata alle capacità di questi missili.
U.S.A. 1960 - XF-108 e YF-12 - RADAR AN/ASG-18
Il sistema di controllo del tiro Hughes AN/ASG-18 era un prototipo di sistema per il previsto aereo intercettore XF-108 Rapier e del Lockheed YF-12 dell’USAF.






È stato il primo radar Pulse-Doppler degli Stati Uniti, che gli conferiva la capacità di guardare verso il basso/abbattimento, ed è stato anche il primo radar a tracciamento durante la scansione (poteva tracciare un bersaglio alla volta). Fu accoppiato con un sistema di ricerca e tracciamento a infrarossi (IRST). La portata del radar è stata stimata tra 200 e 300 miglia (da 322 a 482 km), con rilevamento affidabile di bersagli delle dimensioni di un bombardiere a 100 miglia (160 km). L'installazione stessa era massiccia, pesava 2.100 libbre (953 kg) e occupava la maggior parte della parte anteriore dell'aereo. Il sistema doveva essere utilizzato con il missile Hughes AIM-47 Falcon, anch'esso con una gittata di circa 100 miglia.
Mentre il lavoro di sviluppo veniva svolto con l'XF-108, i missili AN/ASG-18 e Falcon furono testati per la prima volta su di un bombardiere Convair B-58 Hustler altamente modificato. Per adattarsi al radar, il muso venne allungato di quasi 7 piedi (2,13 m) e i sensori a infrarossi furono montati su entrambi i lati della fusoliera anteriore. La forma del naso risultante gli valse il soprannome di "Snoopy". Un singolo missile era alloggiato in una capsula appositamente costruita sotto la fusoliera.
Prima che il test "Snoopy" potesse volare, il programma XF-108 fu cancellato e il proposto intercettore Lockheed YF-12 era destinato a ricevere la coppia radar/sistema missilistico. I test del sistema furono condotti prima nel 1960 e fino al 1963 solo sul B-58 modificato, dopodiché subentrò l'YF-12 fino alla cancellazione dell'intero programma nel 1966.
U.R.S.S. 1965 - Su-15T Taifun - RADAR RP-26 (NATO "Twin Scan”) - OKB: Tikhomirov NIIP - Capo progettista: FF Volkov
Versione iniziale dell'RP-26 Taifun, montata sul Su-15T. Si rivelò molto problematico, poiché le unità sperimentali costruite dallo sviluppatore (NIIP) erano piuttosto scadenti. I set di produzione iniziali, prodotti da Leninetz che costruì la serie Smerch-A, si dimostrarono piuttosto migliori e furono utilizzati per completare i test. Sviluppato per l'intercettore aggiornato Su-15TM, il Taifun era derivato dal radar Smerch-A del MiG-25P ma più piccolo e con prestazioni leggermente inferiori.



Versione definitiva dell'RP-26M Taifun-M. Il radome conico iniziale produceva interferenze indesiderate, riducendo la portata, portando ad un nuovo radome ogivale. Utilizzato insieme all'R-98 AAM:
- Portata di ricerca, nello spazio libero: 60-70 km (bombardiere) 45-55 km (caccia);
- Portata di tracciamento, nello spazio libero: 40-45 km (bombardiere) 35-40 km (caccia);
- Portata di ricerca a basse altitudini: 10-12 km ( bombardiere) 6-10 km (caccia);
- Portata a bassa quota: 7-10 km (bombardiere) 5-10 km (caccia).
La versione finale di produzione Taifun-M2, fu introdotta dopo la defezione di Belenko che compromise il radar Smerch-A su cui era basato il Taifun. Mentre il MiG-25 ottenne un nuovo radar, il Su-15 ricevette un semplice aggiornamento.
U.S.A. 1969 - LTV A-7E CORSAIR II - RADAR AN/APQ-126
Il radar operava nella navigazione aerea a lungo raggio in banda K e nel radar di controllo delle armi. Le sue funzioni principali erano la mappatura del terreno, la distanza aria-terra e la sicurezza del volo.




Il riflettore dell'antenna aveva dimensioni complessive di 33 cm (13,2 pollici) di altezza e 51 cm (22,1 pollici) di larghezza. La polarizzazione era lineare orizzontale o circolare selezionabile dall'utente.
Il radar fu sviluppato per gli aerei d'attacco A-7E della US NAVY e A-7D Corsair dell'USAF all'inizio degli anni ’70.
AN/APQ-126: Radar per seguire il terreno in banda J AN/APQ-116 migliorato da 60 kW di Texas Instruments per A-7D/E AC-130 e CH-53 Sea Stallion. Si tratta principalmente dell'AN/APQ-116/122 che incorporava capacità marittime migliorate.
Specifiche:
- Ricerca di superficie marittima: (alta quota): 150 NM
- Ricerca sulla superficie marittima: (bassa quota): 106 NM
- Ricerca sulla superficie marittima (rispetto a piccoli contatti): 51 NM
- Ricerca sulla superficie terrestre (altitudine media): 34 NM
- Ricerca aerea: 20 NM
- Terreno seguente: 19 NM.
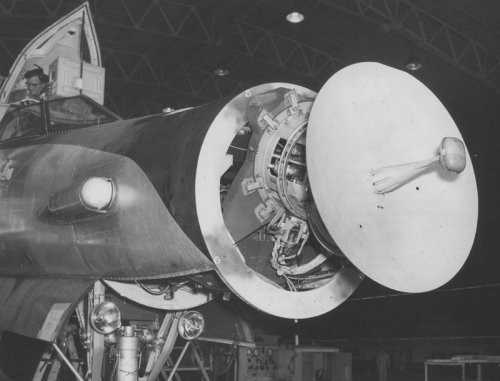
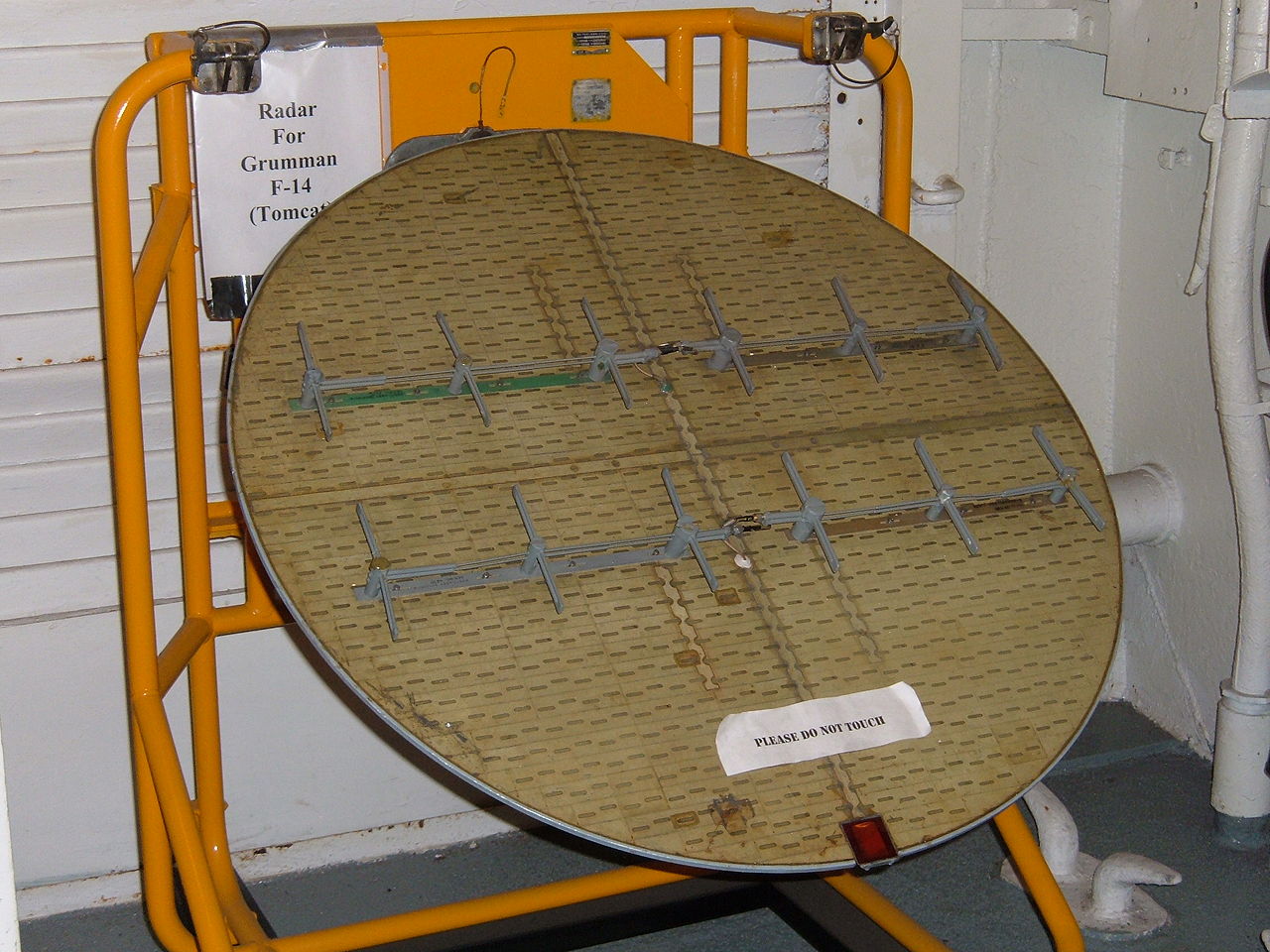
U.S.A. 1970 - F-14A TOMCAT e F-111B - RADAR AN/AWG-9 e AN/APG-71
Sono sistemi radar Pulse-Doppler multimodali in banda X, utilizzati sull'F -14 Tomcat e testati anche sul TA-3B. Si trattava di sistemi aria-aria a lungo raggio in grado di guidare simultaneamente diversi missili AIM-54 Phoenix o AIM-120 AMRAAM, utilizzando la loro traccia durante la modalità di scansione. L'AWG-9 utilizzava un computer analogico mentre l'APG-71 è una variante aggiornata che utilizzava un computer digitale. Sia l'AWG-9 che l'APG-71 furono progettati e prodotti dal Radar Systems Group della Hughes Aircraft Company a Los Angeles; il supporto dell'appaltatore fu successivamente assunto dalla Raytheon. L'AWG-9 è stato originariamente messo a punto per il programma cancellato F-111B della US NAVY.





L'AN/AWG-9 offriva molteplici modalità aria-aria: ricerca di velocità radar a onda continua a lungo raggio, ricerca range-through a distanze più brevi e una modalità track-through-scan in volo con la capacità di tracciare fino a 24 bersagli in volo, visualizzane 18 sui display della cabina di pilotaggio e lanciare contro 6 missili Phoenix contemporaneamente. Questa funzione era stata originariamente progettata per consentire al Tomcat di abbattere formazioni di bombardieri a lungo raggio.
AN/AWG-9: l’AWG-9 fu il risultato di una serie di programmi della Marina degli Stati Uniti per costruire quello che era conosciuto come un "caccia da difesa della flotta": un aereo armato di radar e missili a lunghissimo raggio in grado di ingaggiare formazioni di aerei nemici ben lontano dai gruppi di portaerei. Il loro primo tentativo fu il F6D Missileer, che combinava il radar doppler a impulsi AN/APQ-81 di Westinghouse con il missile Bendix AAM-N-10 Eagle. Il Missileer era un aereo relativamente semplice e quando i pianificatori espressero dubbi sulla sua capacità di sopravvivere dopo aver lanciato i suoi missili, il Missileer fu cancellato e la Marina iniziò a cercare alternative con prestazioni più elevate.
Allo stesso tempo, l'USAF stava lavorando su di un progetto simile di intercettore a lungo raggio, l' XF-108 Rapier che aveva prestazioni molto migliori del Missileer, sebbene il suo radar AIM-47 Falcon e AN/ASG-18, entrambi della Hughes, fossero un po' meno avanzati delle loro controparti della Marina. Anche l'intero sistema era molto costoso e il Rapier fu cancellato, sostituito dal meno costoso Lockheed YF-12 adattato dall'aereo spia Lockheed A-12. Anche questo progetto fu annullato poiché la minaccia strategica si spostò dai bombardieri agli ICBM.
Lo stesso non valeva per la US NAVY, dove la minaccia restavano gli aerei con equipaggio e i primi missili antinave. Hughes suggerì che l'AN/ASG-18 e l'AIM-47 potessero essere adattati per la Marina in una forma leggermente modificata, aggiungendo ulteriore capacità di tracciamento e riducendo le dimensioni dell'antenna radar a una dimensione più adatta. Il risultato fu il radar AN/AWG-9 e il missile Phoenix.
Tutto ciò che serviva era una cellula adeguata, che portò al coinvolgimento della Marina nel programma F-111B. Sebbene i sistemi radar e missilistici iniziassero a maturare (dopo quasi un decennio a questo punto) l'F-111B si dimostrò notevolmente sovrappeso e aveva prestazioni marginali, specialmente in situazioni di motore spento. Allo stesso tempo, il combattimento nel mondo reale sul Vietnam stava dimostrando che l’idea di un caccia missilistico semplicemente non era fattibile, e che qualsiasi progetto di caccia avrebbe dovuto essere in grado di combattere anche con i cannoni, cosa che l’F-111 semplicemente non era possibile. A. Ciò non dovrebbe sorprendere data la genesi dell’F-111 come bombardiere tattico e interdittore.
Dopo molti anni di sviluppo e di discussioni con il Congresso, la Marina finalmente avviò lo sviluppo di un nuovo velivolo appositamente adattato alle loro esigenze. Il nuovo velivolo si chiamava F-14, armato con lo stesso equipaggiamento AWG-9/AIM-54 originariamente previsto per l'F-111B. Sull'F-14, l'AWG-9 era capace e il suo sistema doppler gli consentiva di avere capacità di avvistamento e abbattimento.
Hughes consegnò sistemi AWG-9 e ricambi sufficienti per equipaggiare circa 600 aerei F-14A/B per la Marina e altri 80 aerei per l' aeronautica iraniana. Tutti i sistemi della Marina sono stati ritirati; alcuni dei sistemi iraniani sono ancora in servizio.
AN/APG-71: l’APG-71 era un aggiornamento degli anni '80 dell'AWG-9 per l'utilizzo sull'F-14D. Incorporava tecnologia e moduli comuni sviluppati per il radar APG-70 utilizzato nell'F-15E Strike Eagle, fornendo miglioramenti significativi nella velocità di elaborazione (digitale), flessibilità della modalità, eliminazione dei disturbi e raggio di rilevamento. Il sistema era dotato di un'antenna a lobo laterale basso, un canale di guardia con oscuramento del lobo laterale e tracciamento dell'angolo monoimpulso; tutti destinati a rendere il radar meno vulnerabile ai disturbi.
Il sistema stesso era in grado di raggiungere una portata di 460 miglia (740 km), ma il design dell'antenna la limitava a sole 230 miglia (370 km). L'uso di dati collegati consentiva a due o più F-14D di utilizzare il sistema alla sua portata massima.
Hughes consegnò abbastanza radar APG-71 e pezzi di ricambio per equipaggiare tutti i 55 F-14D prodotti o convertiti prima che il programma F-14D venisse ridimensionato come misura di riduzione dei costi e infine annullato. L'F-14 è stato ufficialmente ritirato dal servizio della Marina degli Stati Uniti il 22 settembre 2006, con l'ultimo volo avvenuto il 4 ottobre 2006.
L’AN/APG-71 è l'aggiornamento digitale della sezione radar dell'AN /AWG-9, entrambi utilizzati come radar di punta nel caccia F-14 “Tomcat”. Il radar incorporava una serie di modalità tra cui la ricerca della velocità (per fornire la massima capacità di rilevamento rispetto ai bersagli con aspetto anteriore), la ricerca con distanza (per rilevare i bersagli con tutti gli aspetti) e la traccia durante la scansione (che, se combinata con un missile autonomo come l'AIM-120, conferiva all'aereo la capacità “lancia e dimentica”).
L'antenna radar primaria è un array monopulse a scansione meccanica, costituito da slot in un sistema di guida d'onda. I dipoli visibili nella Figura allegata fanno parte dell'interrogatore IFF.
Ripensare la guerra, e il suo posto
nella cultura politica europea contemporanea,
è il solo modo per non trovarsi di nuovo davanti
a un disegno spezzato
senza nessuna strategia
per poterlo ricostruire su basi più solide e più universali.
Se c’è una cosa che gli ultimi eventi ci stanno insegnando
è che non bisogna arrendersi mai,
che la difesa della propria libertà
ha un costo
ma è il presupposto per perseguire ogni sogno,
ogni speranza, ogni scopo,
che le cose per cui vale la pena di vivere
sono le stesse per cui vale la pena di morire.
Si può scegliere di vivere da servi su questa terra, ma un popolo esiste in quanto libero,
in quanto capace di autodeterminarsi,
vive finché è capace di lottare per la propria libertà:
altrimenti cessa di esistere come popolo.
Qualcuno è convinto che coloro che seguono questo blog sono dei semplici guerrafondai!
Nulla di più errato.
Quelli che, come noi, conoscono le immense potenzialità distruttive dei moderni armamenti
sono i primi assertori della "PACE".
Quelli come noi mettono in campo le più avanzate competenze e conoscenze
per assicurare il massimo della protezione dei cittadini e dei territori:
SEMPRE!
….Gli attuali eventi storici ci devono insegnare che, se vuoi vivere in pace,
devi essere sempre pronto a difendere la tua Libertà….
La difesa è per noi rilevante
poiché essa è la precondizione per la libertà e il benessere sociale.
Dopo alcuni decenni di “pace”,
alcuni si sono abituati a darla per scontata:
una sorta di dono divino e non,
un bene pagato a carissimo prezzo dopo innumerevoli devastanti conflitti.…
…Vorrei preservare la mia identità,
difendere la mia cultura,
conservare le mie tradizioni.
L’importante non è che accanto a me
ci sia un tripudio di fari,
ma che io faccia la mia parte,
donando quello che ho ricevuto dai miei AVI,
fiamma modesta ma utile a trasmettere speranza
ai popoli che difendono la propria Patria!
Violenza e terrorismo sono il risultato
della mancanza di giustizia tra i popoli.
Per cui l'uomo di pace
si impegna a combattere tutto ciò
che crea disuguaglianze, divisioni e ingiustizie.
Signore, apri i nostri cuori
affinché siano spezzate le catene
della violenza e dell’odio,
e finalmente il male sia vinto dal bene…
(Fonti: https://svppbellum.blogspot.com/, Web, Google, Wikipedia, You Tube)

Nessun commento:
Posta un commento
Nota. Solo i membri di questo blog possono postare un commento.